Carpentier Si Hammou
Compte rendu Réseau
Ethernet Industriel
TP n°1
1
Initiation
à TIA Portal
et aux IHM

Carpentier Si Hammou
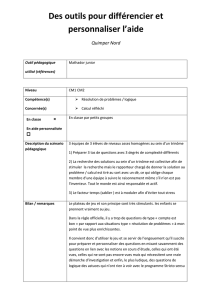
Introduction :
L’objectif de ce TP est d’apprendre à programmer des automates de la
gamme Simatic S7 de la marque Siemens. Dans ce TP nous
programmerons des S7-1200, ce sont des automates d’entrée de gamme.
Pour les programmer nous utiliserons TIA Portal, celui ci peut intégrer
plusieurs automates, plusieurs réseaux de communication, stations de
supervisions, etc.
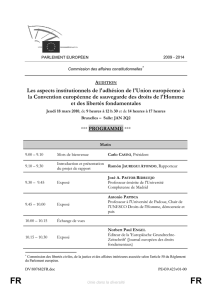
La tache à réaliser est de contrôler un convoyeur et un bras robot qui
déplace des pièces de plastique et qui les rangent par couleurs.
L’utilisateur doit poser les pièces sur le convoyeur puis celles ci vont être
comptées et déposées dans un bac où elles seront attrapées par le robot.
Après elle sont déposées sur le capteur de couleur puis reprise et amenées
dans un bac selon leurs couleurs.
2

Carpentier Si Hammou
1ère partie:Présentation
3

Carpentier Si Hammou
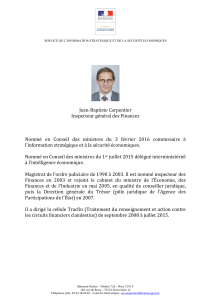
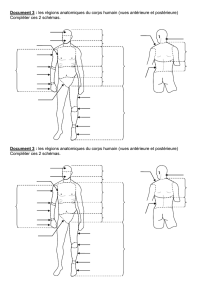
Le GRAFCET fourni dans le sujet décris le comportement de la maquette,
de l’allumage du convoyeur au bras qui se déplace. Mais aussi l’arrêt
d’urgence et la détection de la couleur.
Nous avons aussi dans le sujet le tableau des mnémoniques du programme.
4

Carpentier Si Hammou
2ème partie :HMI
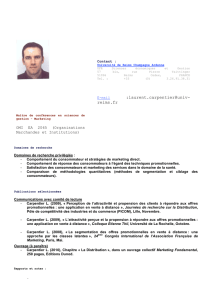
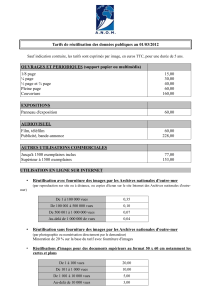
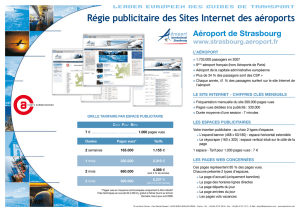
Nous avons, dans TIA Portal, configuré les appareils ( l’automate et
l’écran KTP600 Basic PN ) en entrant leurs adresses IP et les reliant grâce
à une liaison Ethernet.
Et voilà l’écran et l’automate sont reliés.
5
 6
7
8
9
6
7
8
9
1
/
9
100%