Prof. H. NAJIB Optique Géométrique Février 2013
----------------------------------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------------------------------
Université Ibn Tofaïl Faculté des Sciences Département de Physique Kénitra
21
CHAPITRE II
II.1- Système optique centré
Un système optique est un ensemble de milieux transparents, en général homogènes et
isotropes, séparés par des surfaces réfractantes (dioptres) ou réfléchissantes (miroirs).
En pratique, les systèmes utilisés sont symétriques par rapport à un axe, dit de révolution ou
axe optique ; le système est dit alors centré sur cet axe (l’origine des abscisses étant choisie
sur cet axe).
Le système optique centré est dit :
dioptrique : s’il ne comporte que des dioptres ;
catadioptrique : s’il est constitué de dioptres et de miroirs ;
catoptrique : s’il ne contient que des miroirs.
Exemples :
Association de deux dioptres sphériques (Fig. II.1)
Association d’un dioptre sphérique et d’un miroir sphérique (Fig. II.2)
FORMATION DES IMAGES
EN OPTIQUE GÉOMÉTRIQUE
Fig. II.1
Fig. II.2

Prof. H. NAJIB Optique Géométrique Février 2013
----------------------------------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------------------------------
Université Ibn Tofaïl Faculté des Sciences Département de Physique Kénitra
22
Association de deux miroirs sphériques (Fig. II.3)
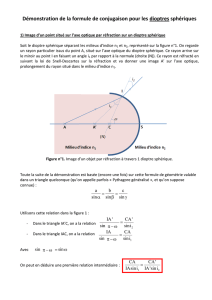
II.2- Points conjugués
Les systèmes optiques sont destinés à former des images d’objets lumineux.
Considérons un système optique SO séparant deux milieux d’indice n et n’ et soit A une
source ponctuelle de lumière située sur l’axe optique. Supposons que A envoie un faisceau
divergent sur le SO (Fig. II.4)
Soit A’ un point de l’axe par où passent tous les rayons émergents issus de A. On dit que A’
est l’image de l’objet A à travers le SO.
Comme les trajets ne dépendent pas du sens de parcours (principe de retour inverse), les
points A et A’ jouent des rôles réciproques : le point A’ peut être considéré comme objet ; le
point A est dans ce cas son image. On dit alors que A et A’ constituent un couple de points
conjugués ou que l’un est le conjugué de l’autre par rapport au SO.
Un point est dit réel si les rayons lumineux passent effectivement par ce point. Il est dit
virtuel si seulement les supports de ces rayons passent par ce point (Fig. II.5).
Fig. II.3
Fig. II.4

Prof. H. NAJIB Optique Géométrique Février 2013
----------------------------------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------------------------------
Université Ibn Tofaïl Faculté des Sciences Département de Physique Kénitra
23
L’espace optique est donc divisé par le SO en quatre parties (Fig. II.6). Notons FEla face
d’entrée de SO et FSsa face de sortie de la lumière en se référant au sens positif de
propagation choisi de la gauche vers la droite de SO.
espace d’objets réels : l’ensemble des points est situé en avant de FE;
espace d’objets virtuels : l’ensemble des points est situé en arrière de FE;
espace d’images réelles : l’ensemble des points est situé en arrière de FS;
espace d’images virtuelles : l’ensemble des points est situé en avant de FS
Convention d’orientation :
On oriente positivement les trajectoires dans le sens de la propagation de la lumière et on
compte algébriquement les trajets parcourus. Considérons l’exemple de la figure II.7.
Fig. II.5
Fig. II.6

Prof. H. NAJIB Optique Géométrique Février 2013
----------------------------------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------------------------------
Université Ibn Tofaïl Faculté des Sciences Département de Physique Kénitra
24
Le point A virtuel est considéré appartenir physiquement au milieu d’indice n. La lumière se
propageant de gauche à droite, le chemin optique s’écrit :
L = (AA’) = (AI) + (IJ) + (JA’)
L nAI (IJ) n 'JA '
nIA (IJ) n 'JA '
Ainsi, le chemin optique est affecté du signe moins pour un point virtuel. On dit que le
chemin est virtuel.
II.3- Stigmatisme rigoureux – Stigmatisme approché
On dit que le SO réalise le stigmatisme rigoureux pour le couple de points (A, A’) si A
et A’ sont parfaitement ponctuels.
La condition du stigmatisme rigoureux est que le chemin optique L soit constant quelque soit
le trajet suivi pour aller de A à A’.
En pratique, il est difficile de réaliser le stigmatisme rigoureux. On se contente d’un
stigmatisme approché lorsque les rayons lumineux passent suffisamment près d’un point. On
n’a donc plus un point lumineux, mais une tâche lumineuse de dimension négligeable (cercle
ou tâche de moindre diffusion).
Si le stigmatisme rigoureux est vérifié pour un couple (A, A’), l’est-il pour tous les points
proches de A et A’ ? On montre que le stigmatisme rigoureux n’est conservé que pour les
points de front et les points de l’axe voisins de A et A’.
II.4- Condition d’aplanétisme d’Abbe
C’est la condition du stigmatisme rigoureux pour les points conjugués B et B’ voisins
de A et A’ et situés dans des plans perpendiculaires à l’axe (Fig. II.8).
L = (AA’) = cste le trajet
Fig. II.7

Prof. H. NAJIB Optique Géométrique Février 2013
----------------------------------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------------------------------
Université Ibn Tofaïl Faculté des Sciences Département de Physique Kénitra
25
α : angle d’incidence ; α’ : angle d’émergence.
Le SO est rigoureusement stigmatique pour :
- (A, A’) si L1=(AA’) = cste le trajet;
- (B, B’) si L2=(BB’) = cste le trajet.
Soit si ΔL = L2– L1= cste le trajet;
ΔL # (HH’) – (AA’)
n 'A 'H ' nAH
sin ' sinn 'A 'B' nAB
le trajet, en particulier pour
α = 0 = α’ ; donc la cste = 0.
D’où la condition d’aplanétisme ou des sinus d’Abbe :
n 'A 'B'.u' nAB.u
; ou
Le système est dit aplanétique pour le couple de points (A, A’) s’il est rigoureusement
stigmatique pour les points (B, B’) du front. La loi des sinus d’Abbe doit être vérifiée.
II.5- Condition d’Herschel
Elle donne la condition de conservation du stigmatisme rigoureux le long de l’axe
optique pour le couple de points C et C’ (Fig. II.9).
n 'A 'B'sin ' nAB sin
Fig. II.8
Fig. II.9
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%





![III - 1 - Structure de [2-NH2-5-Cl-C5H3NH]H2PO4](http://s1.studylibfr.com/store/data/001350928_1-6336ead36171de9b56ffcacd7d3acd1d-300x300.png)