chapitre 4 application a l`etude de quelques mouvements simples

Introduction à la mécanique newtonienne
CHAPITRE 4
APPLICATION A L’ETUDE
DE QUELQUES MOUVEMENTS SIMPLES
Tir d’un projectile
1. SYSTEME COMPOSE
Le système étudié lors d’un mouvement n’est pas nécessairement constitué d’un seul objet.
Par exemple, lors du tir d’un projectile, on peut considérer l’ensemble {projectile + arme} comme le système.
2. CONSERVATION DE LA QUANTITE DE MOUVEMENT ET
CONSEQUENCES
En première approximation, lors du tir d’un projectile, on peut considérer que le système, défini
précédemment, n’est soumis qu’à des forces qui se compensent. On peut donc le considérer comme pseudo-
isolé, et sa quantité de mouvement est constante au long du tir :
Le système étant immobile avant le tir, sa quantité de mouvement est nulle :
On a donc :
Si le projectile part vers l’avant, l’arme a un mouvement vers l’arrière.
Toute personne qui a déjà fait du tir a ressenti les effets de ce mouvement de recul.
Lancer d’un projectile
1. MOUVEMENT DE CHUTE LIBRE
En première approximation, lorsqu’on étudie le mouvement d’un projectile après son lancer, on néglige toutes
les forces extérieures qui s’exercent sur le projectile autres que son poids.
On dit alors que le projectile a un mouvement de chute libre.
Rq : Bien que l’environnement soit à 3 dimensions, le mouvement de chute libre se fait toujours dans un plan. 2
coordonnées (x et z) suffisent donc à l’étudier.
On a donc la situation suivante :
système : projectile de masse m
référentiel : terrestre, supposé galiléen
bilan des forces : poids du projectile
2. IMPORTANCE DES CONDITIONS INITIALES
Au cours de sa chute libre, le projectile peut monter et/ou descendre, verticalement ou également en partie
horizontalement.
La trajectoire qu’il va avoir dépend avant tout des conditions initiales,
c'est-à-dire la position depuis laquelle il a été lancé, ainsi que la vitesse
(direction, sens et valeur) avec laquelle il a été lancé.
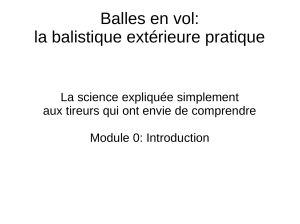
Dans le cas général d’un projectile lancé depuis une altitude h avec un
vecteur vitesse quelconque, on peut écrire :
Rq : Lorsque le vecteur vitesse initial est horizontal, on a
Lorsque le vecteur vitesse initial est vertical, on a
3. PREMIERE APPROCHE ENERGETIQUE
Une étude énergétique d’un mouvement de chute libre permet d’associer la vitesse du projectile à son
altitude. La seule force agissant sur le projectile au cours de sa chute libre est son poids. Il y a donc
conservation de l’énergie mécanique du projectile :
𝑣
x
z
h

Introduction à la mécanique newtonienne
En étudiant le mouvement du projectile entre deux points A et B, on peut donc écrire :
Une étude énergétique d’un mouvement de chute libre permet donc d’associer la vitesse du projectile à son
altitude.
4. EQUATIONS HORAIRES
Le principe fondamental de la dynamique (2eme loi de Newton) permet de modéliser l’évolution
temporelle du projectile :
On a donc, dans le repère défini précédemment (2.) :
Par définition,
L’expression des constantes C1 et C2 dépend des conditions initiales :
On a donc :
Par définition,
L’expression des constantes C3 et C4 dépend des conditions initiales :
On a donc :
Equations horaires
5. EQUATION DE LA TRAJECTOIRE
L’élimination du paramètre temps dans les équations horaires permet d’obtenir l’équation de la trajectoire du
projectile :
D’où l’équation de la trajectoire parabolique du projectile :
L’analyse des équations horaires (position et vitesse) et de l’équation de la trajectoire permettent de dévoiler
tous les secrets du mouvement du projectile après son lancer.

Introduction à la mécanique newtonienne
Mise en orbite d’un projectile
Lorsque le projectile est lancé avec une vitesse trop importante, il peut finir par se trouver en orbite autour de
la Terre.
Rq : Généralement, c’est une situation qui n’est pas fortuite, mais recherchée et/ou étudiée.
On ne peut alors plus considérer un référentiel terrestre comme galiléen. Il faut utiliser un autre référentiel,
plus adapté (géocentrique, héliocentrique, jupitérocentrique, … selon les cas)
1. APPROCHE HISTORIQUE EXPERIMENTALE : LOIS DE KEPLER
Solitaire sur une île déserte de la mer Baltique, l’astronome Johannes Kepler a pu établir au début du XVIIe
siècle trois lois expérimentales pour décrire le mouvement des planètes autour du Soleil.
a. Première loi de Kepler.
Dans un référentiel héliocentrique, les planètes décrivent des trajectoires elliptiques planes dont le centre S
du Soleil est l’un des foyers.
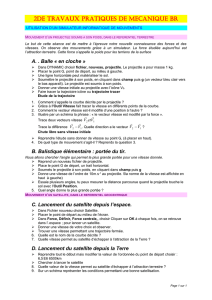
b. Deuxième loi de Kepler : Loi des Aires.
Pendant une durée donnée t, le rayon qui joint le centre S du Soleil au centre de la Terre balaie une aire A
constante, quelle que soit la position de la Terre sur son orbite.
Une étude systématique des orbites des autres
planètes l’amènera à généraliser la loi des aires
aux autres planètes et astres (comètes, …)
tournant autour du Soleil. Le rapport
dépend
alors de l’astre considéré.
Pendant une durée donnée t, le rayon qui
joint le centre S du Soleil au centre d’une
planète balaie une aire A constante, quelle
que soit la position de la planète sur son
orbite.
Rq : Lorsque la distance d’une planète au centre
du Soleil est minimale ou maximale, celle-ci se trouve respectivement au périhélie P ou à l’aphélie A de son orbite.
La loi des aires permet d’affirmer que la vitesse de la planète est maximale en P et minimale en A.
c. Troisième loi de Kepler.
T : période de révolution de la planète autour du Soleil. (en secondes)
a : longueur du demi grand axe de la trajectoire elliptique de la planète. (en mètres)
KS : constante ne dépendant pas de la planète considérée, mais uniquement du Soleil. KS = 2,97.10-19 s2.m-3
Rq : Les trois lois de Kepler ne s’appliquent pas qu’aux astres tournant autour du Soleil, mais également aux satellites
d’une planète, aux planètes d’autres systèmes planétaires, ou encore aux étoiles tournant autour d’un trou noir.
La constante K dépend alors de l’astre autour duquel on gravite.
2. APPROCHE THEORIQUE : INTERACTION GRAVITATIONNELLE
L’interaction gravitationnelle, ou encore gravitation universelle, est l’une des 4 interactions fondamentales qui
régissent notre Univers (interaction gravitationnelle, interaction électromagnétique, interaction forte,
interaction faible).
Elle régit les interactions entre deux corps pourvus d’une masse.
Contrairement aux trois autres interactions fondamentales, l’interaction gravitationnelle est de portée infinie
et toujours attractive.
Par contre, son intensité est beaucoup plus faible que celles des trois autres.
On peut donner une expression simple de la force d’interaction gravitationnelle dans le cadre des deux
approximations suivantes :
Les deux systèmes en interaction ont une répartition de masse à symétrie sphérique. La masse
volumique de ces objets ne dépend que de la distance au centre.
La taille des systèmes en interaction est faible devant la distance qui les sépare. On peut ainsi négliger
les dimensions de ces objets par rapport à leur éloignement.
On peut alors écrire :
G = 6,67.10-11 m3.kg-1s-2 : constante de gravitation.
A
t
A
t
A
t
S
A
P

Introduction à la mécanique newtonienne
Rq : Cette expression est parfaitement applicable à l’interaction entre les corps célestes, dans le cadre de la théorie de
la relativité générale.
Par contre, les approximations nécessaires à l’utilisation de cette expression simple ne sont plus vérifiées dans le
monde nanoscopique, où règne sans partage la mécanique quantique.
Mécanique quantique et relativité générale ne font pas (du moins pas encore) bon ménage.
Rq : A exerce une force sur B, mais B exerce aussi une force sur A telle que :
On retrouve la troisième loi de Newton.
3. REPERE DE FRENET
Pour faciliter l’étude d’un mouvement circulaire, il peut être judicieux de changer d’approche. On ne prend
plus un repère fixe, mais un repère mobile, lié au système étudié. Un tel repère est appelé repère de Frenet.
a. Définition.
A un instant t donné, on peut définir, dans le plan de la trajectoire d'un objet, une base orthonormée
telle que :
Le vecteur unitaire
est tangent au cercle décrit par G et orienté dans le même
sens que sa trajectoire.
Le vecteur unitaire
n
est perpendiculaire à
et dirigé vers le centre du cercle
décrit par G.
b. Interaction gravitationnelle et repère de Frenet.
Dans le repère de Frenet, l’interaction gravitationnelle s’écrit :
Ses coordonnées sont donc :
c. Vitesse et repère de Frenet.
Dans le repère de Frenet, le vecteur vitesse s’écrit :
Ses coordonnées sont donc :
d. Accélération et repère de Frenet.
Dans le repère de Frenet, le vecteur accélération s’écrit :
Ses coordonnées sont donc :
4. MOUVEMENT CIRCULAIRE UNIFORME
En se plaçant dans le repère de Frenet, il est aisé de vérifier que le mouvement d’un objet de masse m autour
d’un astre de masse M est circulaire en première approximation (en négligeant toute action autre que celle de
l’astre) :
Le mouvement de l’objet est donc circulaire uniforme, de vitesse
Rq : Cette relation permet de retrouver la troisième loi de Kepler :
C’est de cette façon qu’on a notamment pu déterminer la masse du Soleil.
p
o
S

Introduction à la mécanique newtonienne
Oscillateurs mécaniques
1. FORCE DE RAPPEL D’UN RESSORT
Lorsqu’un ressort est étiré ou comprimé, il exerce sur la masse accrochée à son extrémité une force de rappel
proportionnelle à son allongement x :
La constante de proportionnalité k est appelée constante de raideur du ressort. Elle s’exprime en N.m-1.
Rq : L’allongement d’un ressort est positif lorsqu’il est étiré, et négatif lorsqu’il est comprimé.
2. MOUVEMENT SINUSOÏDAL
Lorsqu’on lâche un ressort après l’avoir comprimé ou étiré, il se met à osciller autour de sa position d’équilibre
stable. Ce mouvement d’oscillations est périodique.
Le principe fondamental de la dynamique permet de modéliser l’évolution temporelle de ces oscillations.
Rq : Dans l’étude qui suit, on néglige toute force autre que la force de rappel du ressort.
En projetant sur l’axe des oscillations, on obtient :
Rq : Une telle équation, mettant en jeu une inconnue et sa (ses) dérivée(s) est une équation différentielle.
Sa résolution sera vue en cours de mathématiques.
On peut montrer que la solution de cette équation peut s’écrire :
Xm est l’amplitude des oscillations
est appelé pulsation (ou vitesse angulaire) des oscillations.
, avec T la période des oscillations.
Rq : La période des oscillations du ressort dépend de la constante de raideur du ressort et de la masse fixée à son
extrémité :
La vitesse de déplacement de la masse fixée à l’extrémité du ressort varie avec la même période que
sa position :
3. INTERPRETATION ENERGETIQUE
a. Energie potentielle élastique
Lorsqu’il est étiré ou comprimé, un ressort emmagasine de l’énergie potentielle élastique :
b. Transfert d’énergie
Lorsqu’on néglige toute force autre que la force de rappel du ressort, l’énergie mécanique du ressort se
conserve au cours de ses oscillations.
Par contre, il y a transfert périodique d’énergie potentielle élastique en énergie cinétique et inversement.
 6
6
1
/
6
100%