semaine 3 - Moodle Poly Mtl

Cinétique des particules
(semaine 3)
1. Lois de Newton
2. Composantes rectangulaires, normales–tangentielles
et radiales–transverses (polaires)
3. Seconde loi de Newton : DCL=DCE
4. Principe Travail–Énergie
5. Énergie potentielle
© Alain Hébert, 2008

MEC2420Semaine 3 2
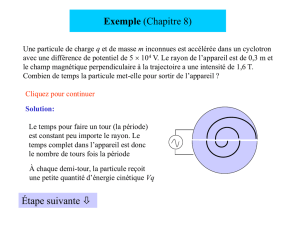
La cinétique est l’étude du mouvement d’une particule ou d’un corps
soumis à une force résultante non nulle.
La masse est la quantité de matière qui compose un corps (kg). Elle
exerce un rôle inertiel, donc elle s’oppose aux variations de mouvement.
Une particule est un corps de masse m dont on néglige les dimensions.
Une force est l’action d’un corps sur un autre. Une force est représentée
par un vecteur (grandeur, direction et respect de la loi du parallélo-
gramme). La force résultante est la somme vectorielle de toutes les forces
s’appliquant sur une particule.
Définitions

MEC2420Semaine 3 3
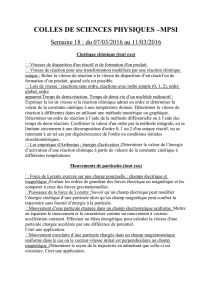
Dynamique Newtonienne
La dynamique Newtonienne est l’étude du mouvement d’une particule ou d’un
corps par l’utilisation des trois lois de Newton (1686):
Une particule reste au repos ou poursuit son mouvement en ligne droite et
à vitesse constante si la force résultante s’appliquant sur cette particule
est nulle.
Lorsque la force résultante s’appliquant sur une particule n’est pas nulle,
cette particule subira une accélération proportionnelle à la grandeur de la
résultante, et dans la direction de celle-ci. On a:
!
!
Les forces d’action et de réaction, agissant sur deux corps en interaction,
sont égales en grandeur, opposés en direction et colinéaires.
!
2 approches utilisées en cinétique Newtonnienne:
1. application directe des lois de Newton (DCL=DCE)
2. principe impulsion - quantité de mouvement
!
2 approches utilisées en cinétique énergétique
4. principe travail – énergie
5. équations de Lagrange
3
2
1
!
i
Fi=ma
1

MEC2420Semaine 3
Diagramme de corps libre
Rappel: La résolution de problèmes de mécanique par la première ou
seconde loi de Newton nécessite l’utilisation d’un diagramme de corps
libéré (DCL)
•On isole une partie du système à analyser et on dessine le contour de
cette partie
•On trouve toutes les forces que l’environnement apporte sur cette partie
et on les représente par des flèches
•On écrit le module de ces forces à coté de chaque flèche
•On représente un système d’axes
•Si le système total comporte plusieurs parties, on peut le démembrer et
dessiner plusieurs DCL. Attention au respect du principe action-réaction
(3 ème loi)
•Il n’est pas nécessaire de faire les DCL des membrures à deux forces dont
la masse est nulle.
•Si le problème est dynamique, on doit aussi utiliser un diagramme
cinétique effectif (DCE).
4

MEC2420Semaine 3 5
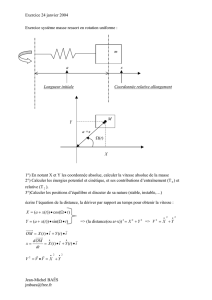
Nécessite la représentation de toutes les forces (actives et réactives) au
moyen d’un Diagramme de Corps Libéré (DCL) et de toutes les forces
effectives au moyen d’un Diagramme Cinétique Effectif (DCE).
!
!
!
!
!
!
!
!
Les vecteurs –ma sont également appelées forces d’inertie.
Deuxième loi de Newton
!
i
Fi=ma
1
t
=
DCL DCE
ma
mg
n
R
N
ma
t
n
θθ θ
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
1
/
32
100%