Chapitre 1 Cinématique du point matériel

7
Chapitre1
Cinématiquedu pointmatériel
1.1.Introduction
1.1.1.Domained’étude
Leprogrammedemécaniquedemathsup selimiteàl’étudedelamécanique classique.
Sontexclus: larelativité etlamécaniquequantique.
Lacinématique consisteuniquementàdécrirelestrajectoiresdepointsenmouvement,
sans s’occuperde ce quipeutêtrelacausedeleurmouvement.Lelienentrelacausedes
mouvements(lesforces)etlestrajectoires seral’objetdu chapitresuivant (dynamiquedu
pointmatériel)
1.1.2.Un peu d’histoire
Lamécaniqueaété étudiédepuisplusieursmillénairesparl’homme,en particulierpour ré-
pondreauxbesoinsdelaconstruction.Leségyptiensparexempleontdéveloppélestechniques
permettantd’éleverdelourdescharges.
Ladéveloppementdelapartiethéoriquedelamécaniquen’intervientquerelativement
récemment. Quelquesdatespeuventêtre citées:
-1638 :Galilée publie”discoursetdémonstrations,deuxsciencesnouvelles”,ouvragedans
lequel il abordelesproblèmesderésistance desmatériauxetdemouvementdescorpspesant
notamment,en dé…nissantmathématiquementlavitesse etl’accélération;
-1657 :Huygensmetau pointlapremièrehorlogeàbalancier,ainsiquelapremièremontre
àbalancieretressortspiral ;
-1687 :Newton publie”Principesmathématiquesdephilosophienaturelle”,ouvrage capital
quiestlefondementdelamécanique classique.
En…n auxXVIIIiµemeetXIXiµemesiècles,des savantstelsqued’Alembert,Lagrange,
Coriolisetd’autres,formalisentlathéoriepourl’ameneràlathéorie classiquetellequ’onla
connaîtaujourd’hui.
Lesdéveloppementsdelarechercheactuelle enmécanique classiques’appuient toujours
surlesmêmeséquationsfondamentales;toutefoislesproblèmesétudiés sontpluscomplexes,
commeparexemplelesvibrationsdansdes solides(voitures), lescorps sontpluscomplexes
commelesproblèmesde corpsdéformables, lamécaniquedes‡uides(turbulencesparexemple);
on peutciteraussi lesétudes surlesrésistancesdesmatériaux.Cenesontlàquequelques
exemples,maisleséquationsfondamentalesnesontpasremisesencause.
L.Menguy,Lycée Montesquieu,LeMans21 novembre2003

8Chapitre1Cinématiquedu pointmatériel
1.2.Repéraged’un point;systèmesusuelsde
coordonnées
1.2.1.Choixd’un systèmedecoordonnées
L’espace contient3dimensions;celasigni…equ’il faut3coordonnéespourdé…nirlaposition
d’un pointMdansl’espace.
Lapremière étape consisteàchoisirun pointquiserviraderéférence :c’estlepoint
originenotéO.
LepointMestalorsrepérépar rapportàO:on note¡!
r=¡¡!
OMlevecteurposition de
M.
Ilresteàrepérerlevecteur¡¡!
OM;ilfautpourceladé…nirunebasevectoriellenotée
(¡!
e1;¡!
e2;¡!
e3).
Levecteur¡¡!
OMpeutalors sedécomposerdanscettebase en:
¡¡!
OM=u1¡!
e1+u2¡!
e2+u3¡!
e3:
(u1;u2;u3)sontlescoordonnéesdu vecteur¡¡!
OMdanslabase(¡!
e1;¡!
e2;¡!
e3).
Toutefois,pourdesraisonspratiques(en particulierlorsde calculsdeproduits scalaireset
produitsvectoriels),ilestimportantquelabaseutilisée soitorthonormée directe.
Orthonormée signi…e:
-ortho:
¡!
e1:¡!
e2=0;
¡!
e1:¡!
e3=0;
¡!
e2:¡!
e3=0;
-normé:
k¡!
e1k=k¡!
e2k=k¡!
e3k=1:
Cettebase estdeplusdirectesi :
¡!
e1^¡!
e2=¡!
e3;
¡!
e2^¡!
e3=¡!
e1;
¡!
e3^¡!
e1=¡!
e2:
Remarque1.1Labaseorthonormée étantdirecte,la”règledestroisdoigts”peut-êtreuti-
lisée (cfexplicationenclasse).
Ilest trèsimportantdebienchoisirlesystèmede coordonnéesdanslequel ladescription
du problèmevaêtrefaitepoursimpli…erlescalculs.
Dansleplan parexemple,on pourrautiliser2 axesxetyetrepérerainsi lepointMétudié.
Toutefois,si lemouvementdeMestcirculaire, l’utilisation dexetyseracompliquée :ilvaudra
mieuxrepérerlepointparsadistance depuisle centreO(rayonr),etl’angleparcouru.C’est
ce quel’onappellelescoordonnéespolaires.
Pourun mouvementàtroisdimensions surlaTerre,ilestusuel(etplus simple!)derepérer
un pointparsalatitude,salongitude etsonaltitude(c’estce quel’onva appelerlesystème
de coordonnées sphériques).
21 novembre2003 L.Menguy,Lycée Montesquieu,LeMans

Section1.2Repéraged’un point;systèmesusuelsde coordonnées9
1.2.2.Lesdi¤érents systèmesdecoordonnées
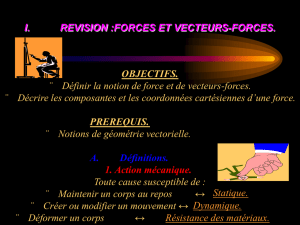
1.2.2.1.Lescoordonnéescartésiennes
Soitun point…xeO(appeléorigine),etunebaseorthonormée directe(¡!
ex;¡!
ey;¡!
ez)…xe.
O
M
ex
ey
ez
Fig.1.1.Coordonnéescartésiennes
Levecteurpositionsenote:
¡¡!
OM=x¡!
ex+y¡!
ey+z¡!
ez;
lescoordonnéescartésiennes sont(x;y;z).
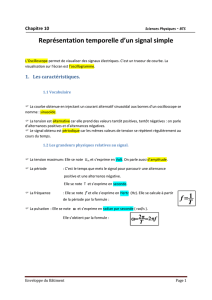
1.2.2.2.Lescoordonnéescylindriques(oucylindro-polaires)
Denombreuxproblèmespossèdentun axeprivilégié,etl’utilisationdusystèmede coor-
donnéescartésiennesestalorspeujudicieuse.Un pointenrotationautourd’un axe(surun
manègetournantparexemple)estplusaisémentrepéréparsadistance aucentre,etparun
anglederotationautourdel’axe.C’estpourfaciliterl’étudedecegenredeproblèmesque
sontintroduiteslescoordonnéescylindriques.
Soitun point…xeorigineOetlesystèmede coordonnéescartésiennes(O;x;y;z)précé-
demmentdé…ni. SoitMun pointquel’onchercheàrepérer.L’axeprivilégiédu problème est
placé suivant(Oz)(parexemplel’axederotation du manège).SoitHleprojetédeMsurle
plan(O;x;y),etZleprojetédeMsurl’axe(Oz):
LepointMestrepérépar:
-rladistance deMàl’axe(Oz),soitladistance ZMouencoreOH;
-µl’angle(¡!
Ox;¡¡!
OM);
-zladistance HM,soitencoreladistance OZ.
restappelérayon polaire;µestl’anglepolaire etzlacote.
Laposition de chaquepointdoit toutefoisêtretoutefoisdé…nieparun uniquetriplet
(r;µ;z).rnevariedoncquede0à+1;µvariede0à2¼;zvariede¡1à+1.
Remarque1.2Cesystèmede coordonnéesestune”versionà3dimensions”dusystème
de coordonnéespolaires:zestla hauteurdupointMpar rapportauplan(Oxy),puis(r;µ)
sontlescoordonnéespolairesdeMdansleplanz=cte.
L.Menguy,Lycée Montesquieu,LeMans21 novembre2003

10 Chapitre1Cinématiquedu pointmatériel
O
M
ez
H
z
x
y
eθθ
er
ez
er
eθθ
ez
r
θ
r
Fig.1.2.Coordonnéescylindriques
Remarque1.3rn’estjamaisnégatif (c’estunedistance),caralorslespointsde coordon-
nées(r;µ;z)et(¡r;µ+¼;z)seraientlesmêmes: ilyauraitalorsplusieurscoordonnées
di¤érentespermettantdedé…nirla positiond’unpointdonné.
Ilresteàdé…nirunebaselocaleassociée àce systèmede coordonnéescylindriquesetnotée
(¡!
er;¡!
eµ;¡!
ez):
-¡!
er=¡¡!
OH=OH=¡!
ZH=ZH;c’estlevecteur radial ;
-¡!
ezestlemêmevecteurqu’encoordonnéescartésiennes;
-¡!
eµestun vecteurtelquelabase(¡!
er;¡!
eµ;¡!
ez)soitorthonormée directe,ce quisigni…e
¡!
eµ=¡!
ez^¡!
er;c’estlevecteurorthoradial.
Remarque1.4Pour repérerlesdirectionsetles sensdesvecteursdelabase cylindrique, il
su¢tdesesouvenirdelaremarquesuivante:
-sirestaugmentéàr+¢r,toutengardantµetzconstants:lepointMsedéplace dans
la directionde¡!
er;
-siµestaugmentéàµ+¢µ,toutengardantretzconstants:lepointMsedéplace dans
la directionde¡!
eµ;
-sizestaugmentéàz+¢z,toutengardantretµconstants:lepointMsedéplace dans
la directionde¡!
ez.
Remarque1.5Ilfautbienremarquerquelabase(¡!
er;¡!
eµ;¡!
ez)estmobile!Lesvecteurs¡!
er
et¡!
eµontunedirectionchangeante quandlepointMsedéplace.
Levecteur¡¡!
OMs’écritalors:
¡¡!
OM=r¡!
er+z¡!
ez:
Ilestimportantdenoterquelevecteur¡¡!
OMn’a aucune composantesuivant¡!
uµ.Celavient
justementdu faitque¡!
ersuitlemouvementdeM.Pourtant,pour repérerlaposition du point
M, ladonnée del’angleµestnécessaireaumêmetitrequeladonnée deretz.
21 novembre2003 L.Menguy,Lycée Montesquieu,LeMans

Section1.2Repéraged’un point;systèmesusuelsde coordonnées11
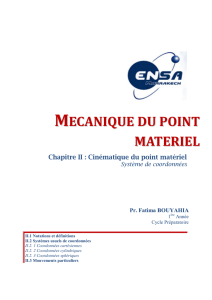
1.2.2.3.Lescoordonnées sphériques
Prenonscomme exempleun pointMrepéréàlasurface delaTerre.Laméthodelaplus
facilepour repérerce pointestl’utilisation dedeuxanglesappeléslatitude etlongitude.Plus
généralement,pourtoutmouvementdeMautourd’un pointOparticulier,ilestpréférable
derepérerMpar3coordonnéesquisont: ladistance depuisO,etdeuxanglesderotation
autourdeO.Cecinousamèneàdé…nirlesystèmede coordonnées sphériques.
Soitun point…xeorigineOetlesystèmede coordonnéescartésiennes(O;x;y;z)précé-
demmentdé…ni. SoitMun pointquel’onchercheàrepérer.SoitHleprojetédeMsurle
plan(O;x;y)(voir…gure1.3):
LepointMestrepérépar:
-rladistance deMau pointO;
-µl’angle(¡!
Oz;¡¡!
OM);
-'l’angle(¡!
Ox;¡¡!
OH):
restappelérayon;µestlacolatitude,'lalongitudeoul’azimut.
O
M
H
z
x
y
er
eθθ
eϕϕ
r
θ
ϕ
Fig.1.3.Coordonnées sphériques
Laposition de chaquepointdoit toutefoisêtredé…nieparun uniquetriplet(r;µ;').rne
variedoncquede0à+1;µvariede0à¼et'variede0à2¼.
Remarque1.6Demême qu’encoordonnéescylindriques,rn’estjamaisnégatif.
D’autrepart'variantde0à2¼, ilsu¢tdefaire varierµde0à¼pourpouvoir”balayer”
touteslesdirectionsdel’espace unefoisetuneseule.
Ilresteàdé…nirunebaselocaleassociée àce systèmede coordonnéescylindriquesetnotée
(¡!
er;¡!
eµ;¡!
e'):
-¡!
er=¡¡!
OM=OM;
-¡!
eµestdansleplan(Oz;OM)etorthogonalà¡!
erpointédanslesensdesµcroissants;
-¡!
e'estdansleplan(Ox;Oy)telque¡!
e'=¡!
er^¡!
eµ.
Remarque1.7Pour repérerlesdirectionsetles sensdesvecteursdelabase cylindrique, il
su¢tdesesouvenirdelaremarquesuivante:
L.Menguy,Lycée Montesquieu,LeMans21 novembre2003
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%