Introduction à la Dynamique

Cours 06 - Introduction à la Dynamique du Solide Lycée Bellevue Toulouse - CPGE MP
Florestan MATHURIN Page 1 sur 6
(1)
pour se fixer les
idées !!
I
ntroduction à la
D
ynamique du
S
olide
!
" #
$
%&
Exemple des Problème
s de Dynamique du Solide
D
IMENSIONNEMENT DES
A
CTIONNEURS
,
R
ECHERCHE DES
L
OIS DU
M
OUVEMENT
,
C
ALCUL DES
A
CTIONS
M
ECANIQUES
T
RANSMISSIBLES DANS LES
L
IAISONS
…
1
-
P
RINCIPE
F
ONDAMENTAL DE LA
D
YNAMIQUE
-
1
ERES
A
PPLICATIONS
S
IMPLES
(1)
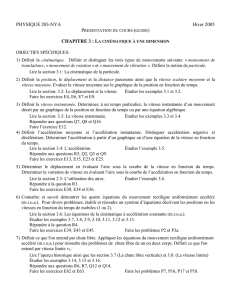
1.1. Cas d’un solide en mouvement de translation
Réel
y(t)
z
r
x
r
y
r
1
0
G
O
Modèle
'(
)
*
+
,
*
+
-(
. / 0 #
1
,2(3*0+,3*
y
&&
1 + , 4 * 4
y
&&
(
'1567
6 8

Cours 06 - Introduction à la Dynamique du Solide Lycée Bellevue Toulouse - CPGE MP
Florestan MATHURIN Page 2 sur 6
(
2
)
)
/
5
9
:
9
$%
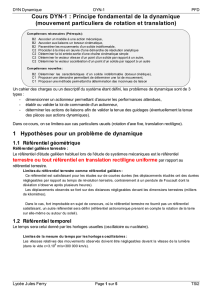
1.2. Cas d’un solide en mouvement de rotation
Réel
θ(t)
1
0
O
Modèle
-;
)
,
z
r
x
r
y
r
z
r
x
r
y
r
G
)
,
-
. / 0 #
1
,2
*$.%
3:
θ
&&
)
,
<)
,
3:
θ
&&
1)
,
4)
,
3
$%4:
$.
x
r
%
$%
4
θ
&&
$.
x
r
%
' 1 . : 3 7
)
,
3)
,
,
θ
&&
3
,=>
8
θ
&&
0
3
#
$%
2
-
P
RINCIPE
F
ONDAMENTAL DE LA
D
YNAMIQUE
-
C
AS GENERAL
Dans le cas général, les mouvements des systèmes ne s’effectuent pas seulement selon une
seule direction comme les exemples simples donnés précédemment. Le Principe Fondamental
de la Dynamique (PFD) permet d’établir une relation entre les actions mécaniques qui sont
appliquées à un ensemble matériel (E) et les quantités de mouvement qui en résultent selon
toutes les directions de l’espace.
2.1. Référentiel Galiléen
Un référentiel Galiléen est l’association d’un repère géométrique et d’un repère temporel pour
lequel le PFD est vrai. En SII, on considère Galiléen :
• Tout repère fixe (i.e. sans mouvement) par rapport à la Terre.
• Ou tout repère en mouvement de translation rectiligne (i.e. sa trajectoire est une
droite) uniforme (sa vitesse est constante) par rapport à la terre.
2.2. Chronologie
Elle est obtenue par les horloges classiques (oscillation d’un quartz).
2.3. Théorèmes généraux – Traduction vectorielle du PFD
Le principe fondamental appliqué pour un solide conduit à l’écriture de deux équations
vectorielles qui constituent les théorèmes généraux :

Cours 06 - Introduction à la Dynamique du Solide Lycée Bellevue Toulouse - CPGE MP
Florestan MATHURIN Page 3 sur 6
• Le théorème de la résultante dynamique :
EE
R/Sd
RR
→
=
• Le théorème du moment dynamique :
)EE(A
R/S,A
M
→
=
δ
2.4. Enoncé du PFD
Il existe au moins un repère galiléen ou absolu noté R et au moins une chronologie, appelée
chronologie galiléenne ou absolue, tels que, pour tout système matériel (E), le torseur des
actions mécaniques extérieures appliquées à (E) soit égal au torseur dynamique de (E) dans son
mouvement par rapport à R.
{
}
{
}
EE
R/E
F
→
=D
→
=
→
→
)EE(A
EE
A
R/E,A
R/Ed
A
M
R
R
δ
où A est un point quelconque
{ }
=
R/E,A
R/Ed
A
R/E
R
δ
D : Torseur dynamique
{ }
=
→
→
→
)EE(A
EE
A
EE
M
R
F : Torseur des actions
mécaniques extérieures appliquées sur E
Les démarches pour le calcul du torseur dynamique seront vues cours 07 et 08.
La démarche de calcul du torseur des actions mécaniques extérieures appliquées sur E est la
même que celle vu lors de l’utilisation du PFS (ce sont les mêmes torseurs).
2.5. Equations de mouvement
Une équation de mouvement est une équation différentielle du second ordre traduisant les
théorèmes généraux, dans laquelle ne figure aucune composante inconnue d’action
mécanique. Il est parfois nécessaire d’écrire plusieurs équations pour trouver par substitution
une équation de mouvement. On nomme « Intégrale première du mouvement » une équation
différentielle du premier ordre avec un second membre constant, obtenue par intégration
d’une équation de mouvement.
3
-
C
ONSEILS
P
RATIQUES POUR LA
R
ESOLUTION DES
P
ROBLEMES DE
D
YNAMIQUE
3.1. Problèmes types
On distingue généralement 2 grands « types » de problèmes en dynamique :
On connait
:
• Les actionneurs
• Les inerties
On cherche
à déterminer
:
• Les lois du mouvement
• Les actions mécaniques des liaisons
Problème de
«
type 1
»
(cours 10
)
On connait
:
• Les lois du mouvement
• Les inerties
On cherche
à déterminer
:
• Les caractéristiques des actionneurs
• Les actions mécaniques des liaisons
Problème d
e
«
type 2
»
(cours
0
9
)

Cours 06 - Introduction à la Dynamique du Solide Lycée Bellevue Toulouse - CPGE MP
Florestan MATHURIN Page 4 sur 6
(3)
Il faut toujours
chercher à écrire le
moins d’équations
possibles, en utilisant
en priorité les
équations associées à
des mouvements de
solides ou d’ensemble
de solides.
3.2. Algorithme de résolution
Pour chaque application du PFD, il est important de se forcer à mettre en place les étapes
suivantes du raisonnement.
On isole le solide ou le système de
solides considéré
" 0
On s’aide d’un dessin si on peut
On effectue le Bilan des Actions Mécaniques Extérieures agissant sur le système isolé
On écrit le PFD
On projette les relations vectorielles sur les axes choisis
On injecte les lois de comportement (ressort, lois de coulomb, …)
On effectue la résolution
.
'9$&%
'$&%
?##
0;
0
@
$
/
$
&%&%
On choisit un repère galiléen et on effectue le bilan complet des données d’entrée du
problème
Pour déterminer les lois du mouvement dans un problème de « type 1 », il faut rechercher les
équations particulières (autant d’équations de mouvement que de paramètres cinématiques
inconnus) qui n’introduisent pas d’inconnues de liaison. Deux cas fréquents doivent être
recherchés :
• Pour un solide (ou un ensemble de solides) en liaison pivot (parfaite) par rapport à un autre
solide, l’équation du moment dynamique écrit sur l’axe de rotation permet d’exprimer la
dérivée seconde du paramètre de position angulaire en fonction du couple appliqué (couple
connu).
• Pour un solide (ou un ensemble de solides) en liaison glissière (parfaite) par rapport à un
autre solide, l’équation de la résultante dynamique projetée sur la direction de la liaison
permet d’exprimer la dérivée seconde du paramètre de position linéaire en fonction de
l’effort (connu) appliqué.
Pour déterminer les caractéristiques des actionneurs dans les problèmes de « type 2 », il faut
rechercher les lois d’entrée-sortie d’actions mécaniques (autant d’équations que de
caractéristiques d’actionneur à déterminer). Il faut donc rechercher les équations particulières
qui n’introduisent pas d’inconnues de liaison
(3)
. Exemples fréquents qui fonctionnent bien :
• Somme des moments autour de l’axe de rotation pour un solide (ou un ensemble de
solides) en liaison pivot, pour rechercher le couple qui anime le solide.
• Somme des forces en projection sur l’axe de translation pour un solide (ou un ensemble de
solides) en liaison glissière, pour rechercher l’effort qui génère le mouvement.

Cours 06 - Introduction à la Dynamique du Solide Lycée Bellevue Toulouse - CPGE MP
Florestan MATHURIN Page 5 sur 6
(4)
C’est probablement
son principal atout !
Par conséquent son
utilisation au
concours ne doit
cependant pas être
systématique.
Notamment pour les
problèmes simples de
dynamique pour
lesquels le candidat
sera clairement guidé
dans la résolution du
problème.
L’utilisation du PFD pour établir les équations recherchées impose toujours des choix précis
fait à partir des particularités des actions mécaniques (de liaison notamment) pour
n’effectuer que les calculs nécessaires. Par conséquent
il est extrêmement important
de prendre le temps et de réfléchir aux 2 premières étapes de
l’algorithme
afin d’élaborer la stratégie de résolution la plus efficace possible.
« Se réfugier dans les calculs de manière brouillonne, inefficace et
douloureuse, tout en pestant contre ces maudits calculs est un défaut
banal. Ne le cultivez pas ! » (J.C. Bône)
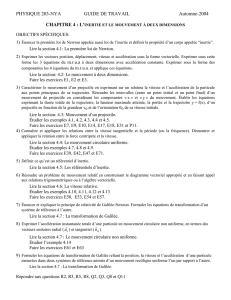
3.3. Graphe d’analyse
Le graphe d’analyse est un outil souvent très utile pour mener à bien un problème de
dynamique, il permet notamment :
• de faire le bilan des actions mécaniques complet du problème,
• de réaliser le BAME associé à un isolement,
• d’élaborer les stratégies de résolution par rapport à un objectif d’étude
(4)
.
Réel
'(
)
*
Graphe d’analyse
0
1
Actionneur :
y.FF
1moteur1moteur
r
→→
=
)z,y,x(O
N
M
L
Z
0
X
rrr
Glissière d’axe (O,
y
r
)
Action de la pesanteur :
z.gg
r
r
−=
Solide 1 de masse M (centre de gravité G)
y(t)
z
r
x
r
y
r
1
0
G
O
Modèle
+
,
Réel
θ(t)
1
0
O
Modèle
-
;
)
,
z
r
x
r
y
r
z
r
x
r
y
r
G
)
,
Graphe d’analyse
0
1
#H>)9
.7
))
r
→→
=
+044.*1
'
!
F
I
G
rrr
6.*14
.
r
+
#,9
07((
r
r
−=
)*(+
9
.7
)()(
r
→→
−=
-(
 6
6
1
/
6
100%