Sciences Industrielles pour l`Ingénieur

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 1 -
Sciences Industrielles pour l’Ingénieur
• Système de freinage du train avant d'un Airbus A320 • Porte de barrage sur la Tamise
Le système de freinage du train avant d’un Airbus A320 permet, par contact avec
frottement entre des disques et des garnitures, de ralentir puis de stopper le
mouvement de l’avion. Comment déterminer la pression hydraulique nécessaire
au niveau des pistons ?
• Ces exemples montrent la nécessité de définir précisément et localement les actions mécaniques qui assurent le service attendu,
pour dimensionner correctement le système ou prédire ses déformations.
La statique étudie les actions mécaniques qui produisent "l’équilibre" d’un système matériel. Comme en cinématique, une
modélisation adaptée va être nécessaire. On vérifiera aussi, dans le cadre de ces études statiques, que les pièces sont fixes ou alors,
s’il y a mouvement, qu’il soit uniforme (vitesse constante) ou bien que les masses des pièces et les accélérations soient très faibles
pour négliger les effets d’inertie (et donc dynamiques).
• Nous débuterons ce nouveau chapitre par un rappel sur les actions mécaniques d’un point de vue physique et mathématique.
1- QU'EST-CE QU'UNE ACTION MECANIQUE ?
1/ Définitions
• Action mécanique (A.M.) : Toute cause susceptible de provoquer
l’équilibre, le mouvement ou la déformation et la destruction d’un
système matériel. Une action mécanique s'exprime par une force
et/ou un moment.
• La FORCE : La force est une action mécanique représentée par un vecteur en un point d’application P ; est un vecteur
dont la direction, le sens et la norme permettent de quantifier l’effet mécanique constaté sur le système 2 subissant la force. Son
unité est le Newton (N).
On appelle support de la force, l'axe défini par le point d'application et la
direction de la force.
Ex : action mécanique du doigt sur une touche du clavier d’ordinateur, du
pneu sur la route, du fluide sur le piston 1.
• Le MOMENT : Pourquoi cette notion ?
Comment nommer/modéliser l’action mécanique exercée par le tournevis sur la vis ?
Comment nommer/modéliser l’action mécanique exercée en A par le sol sur le panneau pour
éviter qu’un vent violent en P ne le fasse basculer ?
On appelle moment en A d’une force appliquée en P, le vecteur noté défini
par : L’unité est le Newton mètre (N.m).
Signification physique : Il traduit la capacité de la force appliquée en P (par exemple du vent 1
sur le panneau 2) à entraîner le système en rotation autour du point A. Il est dirigé selon l'axe
de rotation.
Centre d’Intérêt 8 :
TRANSMETTRE l'énergie – Aspect
STATIQUE
Compétences : MODELISER
MODELISATION DES ACTIONS MECANIQUES :
Associer un modèle à une action mécanique
Associer aux liaisons un torseur d'action mécanique transmissible
TP
COURS 1
TD
REEL
MODELE
Comment déterminer l’action de l’eau sur
une porte du barrage de la Tamise afin de
dimensionner son système de manœuvre et
la porte ?
créer un
déplacement
maintenir
un corps en
équilibre
déformer un corps
P
A

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 2 -
Sciences Industrielles pour l’Ingénieur
Caractéristiques de :
•
3 moyens à connaître pour une utilisation efficace de la formule du moment :
2 exemples :
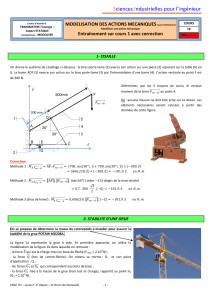
- A droite, un dispositif (traits forts) représente un
pèse-véhicule par une lecture appropriée de l’effort
Q appliqué au point A.
En O, B, C, D : liaisons pivot de direction .
Le poids du véhicule est
appliqué au point G.
- A gauche, un panneau est soumis à son propre
poids.
On souhaite déterminer :
le moment au point C du poids du véhicule ou du
panneau : . On donne : .
2/ Classification
On distingue :
• Les actions mécaniques à distance :
Elles s’exercent au niveau du volume du solide.
Ex : action magnétique, action de la pesanteur, etc.
• Les actions mécaniques de contact :
Elles s’appliquent directement sur la surface du solide (action ponctuelle, surfacique, …).
Ex : pression d’un fluide, action de contact entre deux solides, etc.
3/ Représentation mathématique
• Toute action mécanique exercée par un solide 1 sur un solide 2 et caractérisée par un ensemble de forces appliquées aux
points est modélisée par un torseur d'action mécanique dont on retiendra les 3 écritures :
avec : RESULTANTE de l’action mécanique de 1 sur 2 MOMENT en A de l’action mécanique de 1 sur 2
(indépendante du point d'expression du torseur) (dépendant du point d'expression)
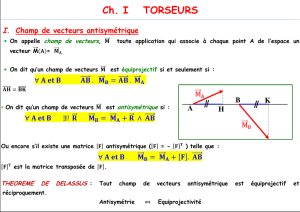
• Rappel sur le champ des moments : (BABAR)
(permet de transporter le torseur du point A vers le point B)
Produit vectoriel
- Direction : perpendiculaire au plan = ( ,
)
- Sens : orthonormé direct (application de la règle du tire-bouchon (ou
des 3 doigts de la main droite) à partir du sens de ).
1- Utilisation classique du produit
vectoriel pour les cas généraux en 3D :
Tracer
2- Autre traduction du produit
vectoriel, connaissant et CG :
Attention au signe : règle tire-bouchon
ou celle des 3 doigts de la main droite
3- Formule dite du "bras de levier" pour les
systèmes plan essentiellement :
Bras de levier = a : distance la plus courte du
point de calcul du moment au support de la
force. C’est donc la perpendiculaire à la force
passant par le point C où l’on calcule le
moment. Dans notre cas, a = CH.
Ou alors :
A
P
dans le plan
Plan défini par ( ,
)
C
G
H
G
Titre Ecriture vectorielle globale Ecriture en ligne (ou "vectorielle détaillée") Ecriture en colonnes
Définition (ou "par les composantes")

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 3 -
Sciences Industrielles pour l’Ingénieur
Disque de frein (à
l’arrêt)
Surface de contact
plaquette / disque
• Rq : - Pour sommer des torseurs, ceux-ci doivent tous être exprimés au même point.
- Le point d'expression est aussi appelé "point de réduction" du torseur.
• Actions mécaniques particulières :
- Torseur couple : un torseur couple est de la forme : et donc s'écrit de la même manière en tout point.
- Glisseur : un glisseur est de la forme : au point d'expression A.
• Application : exercice 1 sur TD1.
2- MODELISATION D'UNE ACTION MECANIQUE sans frottement
• L'étude du système de freinage de l’A320 en introduction conduit à la nécessité de représenter et d’étudier les actions
mécaniques et ses effets à partir d’un modèle local (à l'échelle d'une zone infiniment petite) puis d’évoluer vers une représentation
globale pour déterminer la pression dans le circuit hydraulique. Autre exemple :
1/ Modélisation locale d’une action mécanique
• Si deux solides 1 et 2 sont en contact ponctuel théorique (sans frottement)
au point M, alors le torseur associé à l’action mécanique de 1 sur 2 s’écrit :
La résultante de l’action mécanique de contact est normale au plan tangent au contact.
Ce torseur correspond au torseur d’action mécanique transmissible par une liaison sphère / plan de normale .
(L'action mécanique va être transmise par la pièce 1 à la pièce 2 dans la liaison entre 1 et 2).
2/ Modélisation globale d’une action mécanique (sans prise en compte du frottement)
• La modélisation globale consiste à étudier les actions mécaniques équivalentes à tous les éléments de forces étudiés localement.
C'est le modèle retenu pour tous les problèmes de mécanique du solide indéformable.
: Plan tangent
au contact entre
1 et 2
au point M.
M
(normale au plan )
2
1
(cf. RDM)

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 4 -
Sciences Industrielles pour l’Ingénieur
Contact surfacique
• Autour de chaque point M de la surface de contact, on définit une surface élémentaire de contact dS. L’action mécanique exercée
au niveau de cet élément dS par 1 sur 2 est modélisée par le vecteur de moment nul en M (action élémentaire) :
.
L’action mécanique globale de 1 sur 2, modélisée en un point A quelconque, correspond à la somme de toutes les actions
mécaniques élémentaires en chaque point :
avec où -.
• Exemple de modélisation locale / globale surfacique :
Contact linéique
avec où -.
Répartition volumique
avec où -.
• Méthode pour déterminer le torseur associé à l'action mécanique de 1 sur 2 :
- Représenter la ligne / surface / le volume sollicité localement, ainsi que le repère ;
- représenter M et l'élément , ou et sa limite ;
- représenter et ;
- choisir un système de coordonnées (cartésiennes, polaires ou sphériques).
• Application : exercices 2 et 3 sur TD1.
3/ Quelques actions mécaniques souvent rencontrées
L’action de gravité
Répartition radiale des
pressions de contact
alésage/arbre dans un
palier lisse :
la répartition réelle des
efforts est complexe
Simplification assez réaliste
Axe vertical
vers le bas
Zoom sur un élément de
surface autour de M
M
M
dS
Pour "pression"

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 5 -
Sciences Industrielles pour l’Ingénieur
p
• Définition du centre de gravité :
On définit le point G, centre de gravité d’un solide de masse m de la façon suivante (O = origine du repère attaché) :
ou encore : (car )
On définit le point G, centre de gravité d’un ensemble de solides i de centres de gravité Gi, de masses mi, de volumes Vi et de masses
volumiques i, par :
avec et
• Torseur des actions de pesanteur :
On définit le torseur des actions de pesanteur agissant sur un solide S de masse m comme suit :
avec = vecteur vertical unitaire descendant (vers le centre de la Terre).
Action mécanique d’un fluide sur une surface
• Un fluide exerce toujours une pression normale à la surface sur laquelle il agit :
La résultante des actions de pression vaut donc :
• On peut distinguer 2 situations courantes :
- cas d’une surface plane : , par exemple . On a alors
- cas d’une surface plane circulaire (piston vérin) avec p = cte = P : où . Soit : F = P . S
Transmission d’A.M. dans les engrenages à denture droite
Ex : balle plongée dans un liquide
Effort de 1 → 2 réparti
sur 2 dents
Effort de 1 → 2 transmis
par une seule dent
On modélise toujours l’action au contact par un
glisseur de résultante incliné de α, l’angle de
pression (20° en général), au point I sur le diamètre
nominal (D = m.z, roulement sans glissement en I). La
direction du glisseur est nommée ligne d’action.
MODELISATION
p
[N] [Pa] [m2]
Modèle local Modèle global
I
 6
7
6
7
1
/
7
100%