Méthode expérimentale : l`AFM - Laboratoire de Physique des

Microscopies à balayage de sonde:
Microscope à effet tunnel (STM) et microscope à force
atomique (AFM)
1.INTRODUCTION
Cette manipulation a pour but de permettre une première familiarisation des étudiants avec
des microscopes modernes qui ne sont apparus qu'au cours des années 80.
Le microscope à effet tunnel à été mis au point dans les laboratoires de recherche et
développement de IBM à Rüschlikon près de Zurich par Heinrich Rohrer et Gerd Binning.
Pour ce travail, Rohrer et Binning ont été récompensé du Prix Nobel en physique en 1986.
Puis, en utilisant plusieurs des techniques mises au point pour le STM (abréviation usuelle de
"Scanning Tunneling Microscope") Gerd Binning et Christoph Gerber ont alors mis au point
le microscope à force atomique - AFM pour "Atomic Force Microscope".
Depuis lors de nombreuses variations et extensions de ces microscopes ont été développées.
Ainsi, en 2003 on utilise aussi des microscopes à force magnétique, à force atomique
dynamique, avec balayage thermique, à balayage optique en champ proche etc. La
microscopie à balayage de sonde est un domaine de la recherche scientifique très riche et très
dynamique.
L'idée générale de ces microscopes est de balayer une pointe monoatomique sur une surface à
étudier. Durant ce balayage, on mesure en chaque point une caractéristique de l'échantillon
examiné. La cartographie ainsi obtenue permet de "voir" la surface de l'échantillon.
Dans le cas du microscope à effet tunnel, on mesure le courant entre l'échantillon et la pointe.
Pour le microscope à force atomique, on mesure directement la force de contact entre
l'échantillon et la pointe.
Ces microscopes sont très sensibles et permettent d'observer individuellement les atomes
d'une surface examinée. Cette résolution est accessible assez facilement avec le matériel de
manipulation mis à disposition des étudiants.
Certains de ces microscopes sont aussi utilisés comme machines pour construire atome après
atome des structures physiques intéressantes ou des objets technologiques nanoscopiques.
C'est le domaine de la nanotechnologie.

2. THEORIE SUR LA METHODE EXPERIMENTALE DU STM
2.1 Introduction
L’effet tunnel est un phénomène de transition, interdit par la mécanique classique mais
expliqué en mécanique quantique. Il exprime le fait qu’ une particule, décrite par une fonction
d’ond e dans le formalisme quantique, possède une probabilité non nulle de traverser une
barrière de potentiel à énergie plus élevée que la sienne. Ce principe est interdit en mécanique
classique, puisque la loi de conservation de l’énergie ne serait plus vérifiée.
L’application pratique de ce phénomène est de donner accès à une technique d’étude des
surfaces. On peut en effet modéliser la surface d’un conducteur par une barrière de potentiel
que traversent des électrons sous l’ effet d’ un champ électrique intense, créant ainsi un courant
d’ émission permettant de visualiser la surface.
La théorie classique prévoit que pour qu’un électron puisse quitter la surface d’un conducteur,
il faut qu’i l acquiert une énergie eΦ
0 . C’est le travail de sortie nécessaire pour amener
l’électron de la surface jusqu’à l’infini. Il s’élève pour les métaux à quelques électron-volts.
Le champ électrique qu’on applique a pour effet de réduire la barrière de potentiel à Φ
(Φ < Φ
0 ), mais l’électron reste confiné à la surface, puisqu’il poss ède une énergie inférieure à eΦ.
Ainsi le prévoit la théorie classique !
2.2 Concepts théoriques
En 1983, Binnig et Rohrer mettent au point le dispositif d’un STM qui témoigne de la
possibilité qu’on t certains électrons, ayant une énergie inférieure au travail d’extraction eΦ, à
quitter un solide. Les électrons arrivaient ainsi à surmonter la barrière de potentiel, tout
comme s’ ils la traversaient par un tunnel ! Et la probabilité de sortie augmentait avec le
champ électrique.
La mécanique quantique fournit une explication. Les fonctions d’ond e des électrons de
conduction, solutions de l’ équation de Schrödinger, débordent de la surface avec une densité
décroissant rapidement. La probabilité de présence de l’ électron en dehors du solide, n’est
donc pas nulle à la surface, comme le prévoit la mécanique classique, mais décroît
exponentiellement dans la barrière de potentiel du vide (air). Lorsqu’on approche ainsi une
électrode constituée de la pointe du STM, à quelques distances atomiques de l’ électrode
représentant la surface du conducteur, leurs deux fonctions d’ond e se recouvrent. Lorsqu’on
applique alors un champ électrique extérieur, une différence de potentiel agit sur les électrons,
ce qui crée un courant d’ électrons à travers la barrière de potentiel, dans le vide qui sépare les
électrodes.
Le courant tunnel décroît exponentiellement avec la distance surface-pointe d. Cette
dépendance exponentielle avec la séparation d régit la précision de l’o rdre de quelques
angströms sur la topographie de la surface. En effet, le courant tunnel I subit une variation
d’un facteur e2 avec une modification de d de 1Å. Et c’est la mesure de ce courant tunnel, lors

du balayage de la pointe du STM sur la surface, qui reproduit les variations de morphologie
de la surface de l’ échantillon à imager.
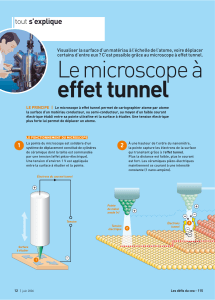
2.3 Principe du microscope
On approche la pointe métallique très fine à une distance d de quelques angströms, de la
surface de l’échantillon. Puis on applique une différence de potentiel de quelques volts entre
ces deux électrodes. Il faut que la pointe soit suffisamment fine afin de produire un champ
électrique intense à son extrémité. Et qui créera un courant tunnel suffisamment intense et
localisé le long d’un e fine colonne, afin d’ atteindre une résolution atomique.
Idéalement on suppose que la pointe est infiniment fine, se terminant par un unique atome. La
sonde présentera ainsi un maximum de résolution. En effet, la qualité des images obtenues
dépend surtout de la forme de la pointe : si la pointe STM est trop large par rapport au relief
de la surface, on a perte de résolution car l’ image acquise est une convolution de la zone
d’ interaction pointe-échantillon. La résolution latérale obtenue, est ainsi de l’ordre de
grandeur du diamètre de l’ extrémité de la pointe. Un autre problème dans l’inte rprétation des
images, est que le courant tunnel dépend à la fois de la topographie de la surface et de sa
structure électronique. L’i mage est alors le produit de convolution du profil électronique de la
surface et de la pointe.
Le courant collecté est mesuré dans un dispositif électronique qui déduira la topologie de la
surface, grâce aux variations exponentielles de courant avec la séparation instantanée d. La
pointe effectue ainsi un balayage latéral de l’ échantillon, à courant constant donné (c’est-à-
dire à distance constante de la surface), à l’ aide de l’a sservissement à une boucle de
régulation. La pointe joue ainsi le rôle d’ une sonde locale qui détermine la densité
électronique de la surface. Lorsque la surface de l’échantillon présente un travail de sortie
constant, le mouvement de la pointe suit la topographie de la surface, à l’aide d’un piézo,
asservi au courant constant fixé. On obtient une représentation tridimensionnelle de la
surface à l’ aide de céramiques piézoélectriques, qui assurent les déplacements de la pointe
avec une précision de l’ ordre de la fraction d’angström. Les piézos permettent des balayages
latéraux dans le plan de la surface, ainsi que des variations normales à la surface.
L’échantillon à étudier peut être déplacé selon la normale à la surface, grâce à un système de
translation piézoélectrique.
Les images sont obtenues avec le STM travaillant en mode courant constant. Ainsi, le courant
tunnel mesuré et amplifié, est comparé avec une valeur de référence imposée par
l’e xpérimentateur. On la choisit comme étant la distance minimum d’a pproche désirée. Afin
de réduire cette erreur, la position verticale de la pointe est ajustée par le système de feedback.
On obtient alors une image topographique de la surface, à densité électronique constante. Elle
apparaît sous forme de contrastes d’ intensités selon Z ; la couleur la plus foncée
correspondant au déplacement le plus grand de la pointe, nécessaire pour maintenir le courant
constant.
Un logiciel informatique de pilotage et d’a cquisition asservit le STM à un ordinateur. Il
permet le choix du mode de fonctionnement, ainsi que le contrôle du balayage de la surface

par la pointe. On peut ainsi sélectionner la vitesse de scannage, la résolution en pixel de
l’ image et les dimensions de l’ image.
Un logiciel de traitement et de visualisation des données permet une analyse des images
acquises. Il permet d’ appliquer des fonctions de filtration, de retirement d’ un plan moyen, de
coupe de profil etc. sur la portion de l’im age sélectionnée.
3. THEORIE SUR LA METHODE EXPERIMENTALE DE L’AFM
Différentes méthodes existent pour explorer les protéines et l’ ADN, chacune ayant ses
avantages et inconvénients. Citons la diffraction de rayons X, la résonance magnétique
nucléaire, la diffusion de la lumière, le microscope électronique et le microscope à force
atomique.
Dans ce travail, nous utiliserons la seule technique qui permet une observation directe de
protéines, d’ADN et d’autres échantillons biologiques non conducteurs; dans des conditions
physiologiques et d’ atteindre une résolution latérale de 10nm. Les caractéristiques des
matériaux non-conducteurs (systèmes biologique, polymère… ) s’ouvrent ainsi à nous.
Remarquons qu’ il est néanmoins possible d’ob server des échantillons biologiques isolants
avec un STM, si on dépose une couche métallique sur la surface.
3.1 Principe du microscope à force atomique
Après l’inv ention du microscope à effet tunnel (STM) limité à l’ étude des échantillons
conducteurs ou semi-conducteurs,Binning, Quate et Gerber développèrent en 1986 le
microscope à la force atomique (Atomic Force Microscope ou Scanning Probe Microscope).
La topographie d’un échantillon isolant peut être obtenue, aussi bien à l’a ir que dans un
liquide.
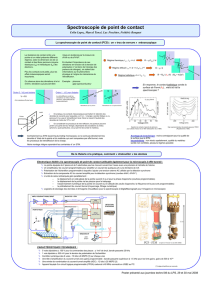
L’échantillon est fixé sur un tube, dispositif composé de céramiques piézoélectriques
permettant des déplacements dans les trois directions de l’espace XYZ avec une précision de
0.1 Å. La sonde de l’ AFM est une pointe ultrafine intégrée à l’ extrémité d’un levier flexible et
sensible à des forces plus faibles que les forces interatomiques. Les déflections du levier (~0.1
Å) résultant des vibrations de forces (~pN) entre la pointe et l’ échantillon lors du balayage
sont mesurées le plus souvent par une détection optique (dans le premier AFM, la détection se
faisait à l’aide d’ un STM). Un faisceau laser est focalisé sur le levier puis réfléchi dans une
photodiode coupée en deux ou quatre quadrants. Le signal différentiel donne la déformation
du levier et donc la force d’ interaction, puisque le levier obéit à la loi de Hooke (F= - k∆z)
pour de petits déplacements. Dans le mode de fonctionnement standard (en contact), la force
est maintenue constante durant le balayage (XY) à l’a ide d’ une boucle de régulation qui ajuste
la position Z de l’ échantillon. La force mesurée Fm est comparée à une force de référence Fc.
Un correcteur électronique permet d’ annuler l’ erreur ∆F= Fm - Fc, en modifiant la position Z
de l’échantillon pour maintenir la force d’int eraction désirée. La position Z en fonction des
positions XY de l’échantillon donne la topographie de la surface.
La caractéristique essentielle des leviers (en silicium ou nitrure de silicium) est la constante
élastique k. Il faut avoir un k petit (par rapport à katom 10N/m), tout en ayant une fréquence
de résonance grande (pour minimiser la sensibilité au bruit). Si ces leviers sont trop mous, la

déflection est trop importante, au contraire, s’ils sont trop rigides, ils risquent d’ endommager
l’échantillon et la sensibilité aux forces est plus faible.
3.2 Les forces dans l’AFM
Parmi les quatre forces fondamentales présentes dans la nature (forte, faible, gravitationnelle
et électromagnétique), seules les interactions d’or igine électromagnétique sont à considérer
lorsqu’on étudie des interactions inter atomiques. Les interactions entre la pointe et
l’échantillon, et donc le processus responsable du contraste dans les images AFM, sont d’un e
grande complexité. Les atomes se trouvant à l’ extrémité de la pointe participent aux
interactions à courte portée, tandis que la grande partie de la pointe contribue aux forces à
longue portée. En plus de la pointe et de l’échantillon, l’ environnement joue un rôle important
(constante diélectrique… ). Durant le balayage, l’int eraction devient un processus dynamique ;
les liaisons pointe-échantillon sont sans cesse formées et cassées.
Lorsqu’on travaille à l’air, les forces les plus importantes sont :
- Les forces de capillarités qui jouent un rôle important si l’expérience est conduite dans des
conditions ambiantes. La surface de l’échantillon est recouverte d’une couche d’ eau (épaisseur
de 50Å à 500Å selon le degré d’humid ité). Cette force dépend fortement de la forme de la
pointe. Une estimation donne une force de capillarité de 30 nN, d’où la nécessité de travailler
dans un environnement d’ azote sec ou de plonger le système levier-échantillon dans un
liquide ou encore d’utiliser une pointe hydrophobique;
-les forces électrostatiques ;
Lorsqu’on travaille dans les liquides, la force de capillarité n’ est plus que d’ environ 100 pN.
Les forces importantes sont maintenant :
-les forces de Van der Waals, presque toujours attractives: c’ est un effet purement quantique
provenant des fluctuations du dipôle (dispersion) électrique de l’ atome. Il est possible de
modéliser le système pointe-échantillon comme une sphère sur une surface plane. La force de
Van der Waals dans ce cas :
F(r) = -AR / 6r2
où R est le rayon de la pointe et A est la constante de Hamaker (dépend du matériau et de la
densité). Une valeur typique de A est ~10-19 J, donnant des forces entre la pointe et
l’échantillon entre 10-10 N et 10-9 N selon le liquide. Notons qu’il existe dans certains liquides
une forme répulsive de la force de Van der Waals ;
-la force de "double layer" due à la présence d’ions dans la solution et de charges sur le levier
(force électromagnétique).
De plus, il y a la force répulsive de Born (interaction d’échange due au principe d’ exclusion
de Pauli), allant selon r -12 qui est toujours présente.
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%