Élaboration d`un microscope à force atomique

1
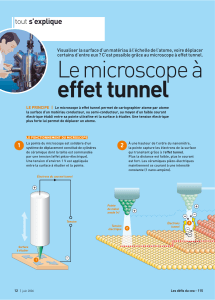
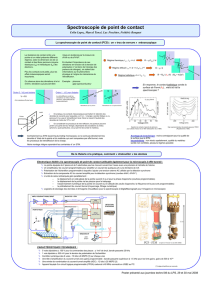
? Le microscope à effet tunnel
? Le microscope à force atomique
Dossier réalisé par :
PORCHER Nicolas
VIGNERON Basile
MARTINEZ Pierre
ROMEU Guillaume
TISSOT François
Encadrement :
JEANJACQUOT Philippe.
LYCEE CHARLIE CHAPLIN
DECINES

2

3
Index
Remerciements………………………………………………………………………p 4
Résumé……………………………………………………………………………..….p 5
Bibliographie…………………………………………………………………………p 6
Introduction……………………………………………………………………...…...p 7
A Théorie…….…………………………………………………………...…………p 8
I Le microscope à effet tunnel (STM)……………………………..p8
a) Principe de l’effet tunnel
b) Fonctionnement du STM
II Microscope à force atomique (AFM) …….…………….…..… p 10
Principe et fonctionnement
B Evolution et élaboration de notre propre AFM ………….…..…p11
I Le palpeur………………………………………………………………p12
II Piezo XYZ……………………………………………………………..p13
III Mécanique, approche manuelle……………………….………..p15
1ére
configuration :
2éme configuration :
IV Régulation…………………………………………………..…….….p18
a) Principe
? Mode à hauteur constante.
? Mode à « oscillation » constante.
b) Détection électronique de la résonance du fil.
V Balayage, acquisition, représentation ………………………….p21
VI Assemblage des différents éléments……………………………p21
C Expériences, tests et manipulations. ……………………………..….p23
I Attaque chimique des pointes……………………………………..p23
1)Préparation de la solution de CaCl2 :
2)Préparation de la pointe
II Test de la boucle de régulation…………………………………..p24
III Montage du fil sur le quartz……………………………………p25
IV Test de notre Piezo de déplacement. ……………………….…p25
Topographies de matériaux par AFM ou STM…………………………….p26
Conclusion ………………………………………………………………………….p27

4
REMERCIEMENTS :
? M. Philippe DUMAS ,directeur de recherche dans le service
« microscopie à champ proche » au GPEC de Marseille et toute son
équipe de chercheurs : ACKERMANN Jörg.
BELLINI Boris .
BATTAGLINI Nicolas .
KLEIN Hubert .
? CADETE SANTOS AIRES et M. GENET du CNRS de Lyon .
? NATIONAL INSTRUMENT pour leur prêt de la carte PCI-MOI-16 E-
4 .
? M. ROMEU et M. LOISON, Artisan et professeur de BTS au Lycée
Charlie Chaplin de Décines .
? Mme MAILLARD et M. MASSAULT, professeurs d’électronique au
Lycée Charlie Chaplin .
? M. JEANNOT , professeur de Physiques appliquées au Lycée Charlie
Chaplin .

5
RESUME :
La microscopie à champ proche inventée en 1986 par Binnig et Rohrer
regroupe deux familles de microscopes :le STM et l’AFM .
Nous avons commencé à étudier l’aspect théorique de la microscopie à
champ proche (la mécanique et les forces de proximité entre autre ).
Notre choix d’élaboration pour observer l’atome s’est ensuite orienté vers
un AFM qui est moins complexe dans sa construction et qui possède un plus
large champ d’étude. Pour cela nous avons cherché à construire et à simplifier
les éléments de notre AFM .
Après une série de calculs et d’expériences nous en sommes arrivés à une
version simplifiée , dans sa construction .
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
1
/
29
100%