Biomécanique des os du poignet

Ann. Kinésithér., 1985, t. 12, nO 6, pp. 291-304
©Masson, Paris, 1985
Biomécanique des os du poignet
CONDUITE A TENIR DEVANT ...
1
J. GRIFFET (1), F. BASTIANI (2)
(1) Chef de clinique -Assistant, service de neuro-chirurgie, Centre Hospitalier Universitaire de Nice, Hôpital Pasteur, F 06031 Nice
Cedex. (2) Interne, service de Chirurgie Infantile, Hôpital Leuval, 57, avenue de la Californie, F 06200 Nice.
Le poignet constitue un complexe articulaire
intermédiaire entre l'avant-bras et la main. Il
obéit àdeux impératifs contradictoires :la
mobilité et la stabilité.
Pour assurer ces fonctions, le carpe est
organisé en une chaîne cinétique fermée à
géométrie variable. Les deux ligaments annu-
laires dorsal et surtout palmaire permettent
de réaliser une précontrainte de ce complexe
articulaire ce qui augmente sa cohésion.
Le carpe se présente comme un mobile à
rotation centré dans les plans sagittal et
frontal, permettant de conserver la longueur
des bras de levier.
Enfin, ilfaut insister sur le rôle stabilisateur
du muscle cubital postérieur qui met en
tension le complexe fibreux et plaque la tête
cubitale vers l'avant.
Introduction
La biomécanique fait apparaître la complexité
des mouvements de chaque articulation compo-
sant l'avant-bras relié àla main par le poignet.
Nous verrons donc la cinématique de la prono-
supination puis l'étude des articulations radio
et médio-carpiennes, le rôle des ligaments
extra-articulaires, celui des muscles anti-bra-
chiaux, enfin la mobilité du poignet pour
terminer par une synthèse de la biomécanique
articulaire du poignet.
Tirés à part: J. GRIFFET, àl'adresse ci-dessus.
Cinématique de la pronosupination et étude
des articulations radio-cubitales supérieure
et inférieure
- La pronos~pination est un type de mouve-
ment qu'autorise le poignet en faisant intervenir
l'articulation radio-cubitale inférieure. Mais ce
mouvement ne peut se produire qu'avec la
participation de l'articulation radio-cubitale
supérieure.
Au cours de ce mouvement, il n'existe pas un
seul centre de rotation (au sens large de centre
de mouvement), mais de nombreux axes de
rotation. Chaque point particulier correspon-
dant au centre de mouvement entre deux
positions successives est appelé «centre instan-
tané de rotation »(CIR). L'étude de ces
différents points est au mieux réalisée grâce à
la cinématique plane par constructions graphi-
ques ou grâce àla cinématique spatiale àl'aide
de modèles mathématiques.
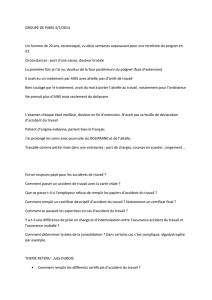
Ainsi, en géométrie, le centre de rotation se
définit graphiquement (fig. 1).
Soit Ma et MJ3 les positions successives
occupées par un point M aux instants ta et tJ3;
soit Pa et PJ3les positions correspondantes d'un
point P (fig. 1). Le centre de rotation se trouve
àl'intersection des médiatrices de Ma - MJ3
et Pa - PJ3.
Cette construction graphique n'a de valeur
que dans la mesure où les positions sont très
rapprochées l'une de l'autre. La trajectoire des
CIR se retrouve entâchée de toutes les erreurs
dues aux reports successifs.
En cinématique plane, on étudie la répartition
des vitesses des points du plan mobile dans son
mouvement par rapport àun plan fixe. Le CIR

292 Ann. Kin ésithér., 1985, t. 12, nO 6
-
-
FIG. 1. - Détermination graphique du centre de rotation.
Va
o
FlG. 2. - Distribution des vitesses autour du centre instantané
de rotation, étude en cinématique plane :
- vitesses tangentes aux trajectoires,
- centre instantané de rotation (CLR.),
- unicité (CLR.),
- similitude des triangles des vitesses.
correspond àun point dont la vitesse est nulle
àl'instant considéré; il distribue àun instant
donné les vitesses du solide mobile (fig. 2).
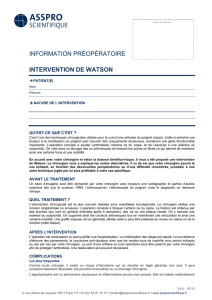
L'étude cinématique du mouvement, quand
l'avant-bras passe de la pronation àla supina-
tion, montre d'après Fischer (1) :
- au niveau de la radio-cubitale supérieure
(fig. 3) :
1) de 0° à70° : les CIR sont très mobiles au
début mais se limitent àune zone dans la moitié
externe de la tête radiale (Zone 1).
2) de 70° à 110° : les CIR se concentrent dans
une zone en dedans de la précédente (Zone II).
3) de 110° à165° : les CIR se retrouvent dans
FIG. 3. - Trajectoire des Centres Instantanés de Rotation au
niveau de la radio-cubitale supérieure.
F.J,L) JUS
CUBITUS
FlG.4
FlG. 4. - Trajectoire des CIR au niveau
de la radio-cubitale inférieure.
FlG. 5. - Trois zones de rotation sont
décrites pour le radius :
- entre 0et 70~ autour d'un axe I-III;
- de 71 à 110~ autour d'un axe II-III;
- de 111 à165~de nouveau autour de
l'axe I-IL
une zone pratiquement superposable àla pre-
mière (Zone l').
4) en pronation forcée: les CIR se placent au
niveau de l'interligne articulaire ce qui traduit
un roulement sans glissement du radius sur le
cubitus;
- au niveau de la radio-cubitale inférieure
(fig. 4) : les CIR se regroupent dans une zone
qui se situe en regard de la tête du cubitus
(zone III). En pronation forcée, on retrouve des
CIR au niveau de l'interligne articulaire, ce qui
traduit des roulements sans glissement du radius
sur le cubitus.

,
Lgt radio-lunaro-pyramidal
~
Lgt cubi ta-carpien
FIG. 6. - Autour du ligament triangulaire (TR) s'organisent les
structures fibreuses qui limitent le mouvement. Lorsque le muscle
cubital postérieur est relâché, la prono-supination passive du carpe
est possible. Lorsque le muscle est contracté, le massif carpien
est stable, la prono-supination du carpe devient impossible.
L'axe du mouvement est ainsi précisé. Cet axe
n'est pas fixe, sa position varie suivant l'ampli-
tude du mouvement.
Ainsi, lorsque le mouvement se fait de la
supination à la pronation, le radius tourne
(fig. 5) :
- d'abord autour d'un axe I-III, de 0°à70°, qui
passe par la zone l en haut, la zone III en bas;
- puis autour d'un axe II-III, de 70°à 110°,qui
passe par la zone II en haut, la zone III en bas;
- en finde pronation, de 110°à165°,de nouveau
autour de l'axe I-II1.
L'articulation radio-cubitale inférieure est une.
articulation trochoïde dont les surfaces arti-
culaires sont maintenues en contact par les
ligaments.
Le ligament triangulaire est la pièce maîtresse
de la stabilité de la partie interne du poignet,
car toutes les structures fibreuses de la région
convergent vers lui (fig. 6).
Il prolonge en dedans la glène radiale. Ses
deux tiers externes sont pratiquement rigides,
en raison de leur revêtement cartilagineux, et
solidaires du radius grâce àleur large implanta-
tion sur ce dernier, à leurs intrications avec la
partie interne des ligaments radio-pyramidaux
Ann. Kinésithér., 1985, t. 12, nO 6 293
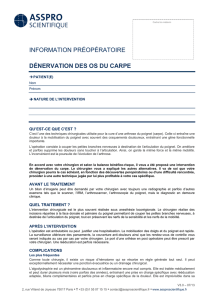
FIG. 7. - Vue dorsale du carpe :a. en abduction. b. en
adduction. Le massif carpien ne se meut pas d'un bloc, il s'agit
plutôt d'un «condyle à géométrie variable », La rangée distale
est plus rigide, mais la rangée proximale s'adapte en permanence
aux surfaces articulaires du radius et du cubitus.
implantés en avant et en arrière de la cavité
sigmoïde. Il contribue ainsi à la suspension du
carpe.
Il assure la cohésion radio-cubitale au cours
de la prono-supination volontaire grâce àsa
couche proximale qui s'insère à la base de la
styloïde cubitale et qui s'avère la seule structure
solide tendue en permanence entre le radius et
le cubitus. Enfin,il maintient le tendon du cubital
postérieur en arrière de la tête cubitale, en
amarrant solidement sa gaine.
Étude mécanique des articulations
radio-médio-carpiennes
Ces articulations permettent deux types de
mouvement; la flexion extension et l'inclinaison
radio-cubitale.
LES FACTEURS OSSEUX
L'action mécanique, d'origine musculaire, se
répartit dans trois directions en raison de la
morphologie des pièces osseuses.
Au concept classique de carpe monolithique,
se substituè actuellement celui du condyle à
géométrie variable (fig. 7). Ainsi, la disposition
relative des pièces osseuses dépend d'un équili-
bre dynamique.

294 Ann. Kinésithér., 1985, t. 12, nO 6
b
FIG. 8. - Les deux classifications du carpe: a) transversale :
b) longitudinale.
Différentes classifications des os du carpe ont
été proposées (fig. 8) :
- classiquement, les os du carpe sont disposés
en deux rangées, selon certains auteurs, ils
peuvent être classés en trois colonnes
longitudinales;
- la division horizontale met l'accent sur la
cohésion osseuse transversale avec les deux
rangées proximale et distale.
La proximale, structure intermédiaire entre
le radius et carpe distal, répond àla fois àla
radio-carpienne et la médio-carpienne, et
s'adapte en permanence aux surfaces de ces deux
articulations (fig. 7).
La rangée distale est beaucoup plus rigide. Les
articulations carpo-métacarpiennes, àl'excep-
tion de celle du pouce, sont des arthrodies. Si
le quatrième et surtout le cinquième métacar-
piens ont une légère mobilité, le deuxième et le
troisième sont presque rigides. Ils forment, avec
la rangée distale du carpe, le squelette fixe de
la main. En acceptant la division verticale
[Landsmeer et Kauer (18)], Navarro attire l'at-
tention sur la cohésion 10hgitudinale indispensa-
ble pour la transmission des forces musculaires.
Ainsi, le carpe est composé de trois colonnes
verticales :
- la colonne centrale ou colonne de flexion-
extension; formée par le semi-lunaire, le grand
os et l'os crochu;
- la colonne externe ou colonne mobile compo-
sée du scaphoïde, du trapèze et du trapézoïde;
- la colonne interne ou colonne de rotation
formée par le pyramidal et le pisiforme.
FIG. 9. - Les colonnes du carpe (d'après J. Taleisnik)
a. interne de rotation.
b. centrale ou de flexion.
c. externe ou mobile.
Taleisnik (23) a, en 1971,modifié cette théorie
en suggérant d'inclure dans la colonne centrale,
non seulement le semi-lunaire, le grand os et l'os
crochu, mais toute la rangée distale du carpe
et de limiter la colonne externe au scaphoïde et
la colonne interne au pyramidal (fig. 9). Le
semi-lunaire et le grand os dans la colonne
centrale et les deux colonnes latérales sont les
sièges d'insertions ligamentaires multiples
(fig. 10). Vers le grand os convergent des fibres
en forme de V venant en haut du radius, du
scaphoïde et du pyramidal. A l'intérieur de ce
V, il en est un second constitué par les ligaments
radio-lunaire et cubito-lunaire convergeant vers
la surface palmaire du semi-lunaire. La face
palmaire du scaphoïde a trois surfaces précises :
l'une proximale pour l'insertion des ligaments
contrôlant les mouvements du scaphoïde surIe
radius (ligament profond radio-scapho-lunaire),
l'autre 'distale, stabilisée par le ligament latéral
externe, et par la position externe (scaphoïde,
grand os) du ligament en V, et une zone centrale
pour le passage du ligament radio-grand os ou

l
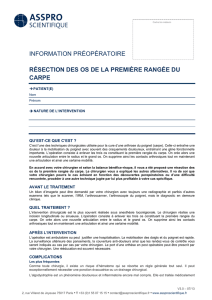
FIG. 10. - Schéma d'insertions des ligaments palmaires du
poignet convergeant sur le grand os (d'après J. Taleisnik). Noter
la position du ligament radio-grand os, pivot de la rotation du
scaphoïde.
ligament en fronde, pivot de la rotation du
scaphoïde. De multiples faisceaux puissants qui
prennent leur origine sur le complexe cubito-
carpien (ménisque cubito-carpien), le semi-
lunaire (ligament pyramido-Iunaire) et le grand
os (faisceau grand os pyramidal du ligament en
V) convergent vers le pyramidal pour s'insérer
sur une surface entourant la base de la facette
pisiforme. Un ensemble ligamentaire similaire
se trouve à la face dorsale du pyramidal. Le
carpe se comporte donc comme une colonne
centrale longitudinale de flexion-extension dans
laquelle on peut inclure le radius, créant ainsi
un système longitudinal à trois chaînons dans
lequel le semi-Iunaire est le segment intermé-
diaire. Dans cette colonne, s'attachent les deux
structures en V. Tous les mouvements radio-
carpiens sont dus à l'action de muscles situés
à l'avant-bras et qui s'insèrent sur les métacar-
piens, au-delà du carpe. Tous les mouvements
sont transmis à la rangée distale du carpe
essentiellement par l'intermédiaire des deuxième
Ann. Kinésithér., 1985, t. 12, n° 6 295
/
.' f'
/.//J6~~
.n··vu
••.. T' •• 0. •••••••• f.
FIG. 11. - f: Force déviée en dedans. f:Force déviée en avant.
O.C. : Pente de l'os crochu. jT. :Forcë déviée en avant par la
pente du trapèze.
en a : vue antérieure.
en b : vue latérale.
et troisième articulations carpo-métacarpiennes.
A cause de la fixitéde ces articulations, la rangée
distale du carpe se mobilise avec la main tandis
que le semi-Iunaire, qui constitue le segment
intermédiaire, bouge sous l'action de ligaments
et de pressions exercées sur le semi-Iunaire par
la tête du grand os. Le scaphoïde ou colonne
externe constitue une barre de connexion qui
stabilise le système et permet la transition entre
les articulations radio-carpienne et médio-car-
pienne. Le pyramidal est le pivot autour duquel
se produit la rotation du carpe et de la main.
Ce concept est en accord avec la disposition des
ligaments convergeant vers le pyramidal et avec
la forme de l'articulation entre le pyramidal et
la facette hélicoïdale de l'os crochu. Ainsi, lors
de la dorsiflexion du poignet et de l'inclinaison
cubitale, la main tend à se mettre en pronation
tandis que pendant la dorsiflexion et la déviation
radiale, il y a supination de la main. Cette
rotation intrinsèque du carpe est importante
dans le mécanisme de certains traumatismes du
poignet et dans leur traitement.
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%