Diapositive 1

Etude pour la mise en œuvre d’un
nouvel implant de stabilisation
scapho-lunaire.
Laetitia Rossi
24 Mai 2013
1
Directeur de thèse: JM. Linares
Co-directeur de thèse : J. Mailhé
Responsable entreprise : F. Impellizzeri

Sommaire
1. Introduction
2. Déplacements des os
3. Dimensionnement /Simulation numérique
4. Suite des travaux : essais expérimentaux
mécaniques
5. Conclusions
2

Introduction
3
•Carpe : 8 os sur deux rangées
•33 ligaments
•1ère rangée mobile
» articulation avec radius et ulna
» articulation avec 2ème rangée du carpe
• Mouvements :
»Flexion / extension
»Inclinaisons radiale et ulnaire
»Poignet : prono-supination
http://www.epaule-main.fr

Ligament Scapholunaire
4
•Ligament intra-articulaire unissant le scaphoïde et le semi-
lunaire
•Principal stabilisateur du scaphoïde
http://www.epaule-main.fr

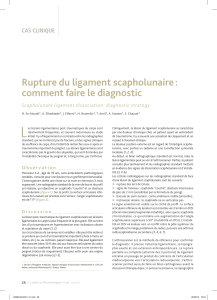
Ligament ScaphoLunaire
•3 parties : antérieure (palmaire), intermédiaire, postérieure
(dorsale).
•Partie dorsale : casse en hyperextension
•Caractérisé par sa raideur et sa force à la rupture
5
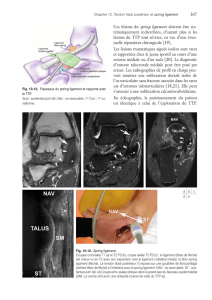
Ligament
D’après C. Sokolow
Institut Français de Chirurgie de la Main. ORAN 2010Institut Français de Chirurgie de la Main. ORAN 2010
P I
A
D’après RA Berger.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
1
/
28
100%