Génie mécanique - Concours de l`ENSEA

BANQUE D’ÉPREUVES DUT-BTS
— SESSION 2010 —
ÉPREUVE DE MÉCANIQUE
CODE ÉPREUVE : BE-MÉCA
CALCULATRICE INTERDITE
DURÉE : 2H30

Exercice 1
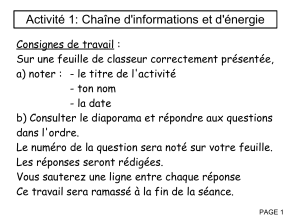
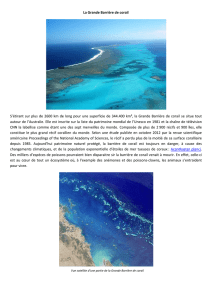
Le système étudié est présenté sur la Figure 1(a). Il s’agit d’un disque 2guidé en rotation sur
un arbre 1,lui-mêmeguidéparuneliaisonpivotparrapportaubâti0.Ledisque,d’épaisseure,de
rayon Ret de masse M,comportesixusinagesidentiquesrépartisangulairementde manière égale
(tous les 60°) (voir Figure 1(b)). La rotation de l’arbre par rapport au bâti est paramétrée par l’angle
αautour de l’axe (O1,!z0).Larotationdudisquesurl’arbreestparamétréeparl’angleθautour de
l’axe (O2,!x1).OnnoteLla distance entre les deux centres de rotation O1et O2.Idésigne le point du
disque tel que −→
O2I=−R!z1.
L
z0z1
=
y1
x0
x1
y0
α
θ
x1x2
=y1
y2
z1
z2
R
O2
O1
I
2
0
1
z2
y2
Figure 1 – (a) Disque guidé en rotation par rapport au bâti. (b)Vuedefacedudisque.
(A) En toute rigueur et sans connaître les dimensions des usinages, on peut tout de même affirmer
àlavuedelaFigure 1(b) que l’opérateur d’inertie du disque 2s’écrit comme suit au point
O2et dans la base (!x1,!y1,!z1):
I(O2,2)=
A00
0B0
00B
(!x1,!y1,!z1)
où Aet Bsont des constantes dépendant de la masse Met des dimensions du disque.
(B) On décide maintenant de négliger les six usinages pour calculer l’opérateur d’inertie. En fai-
sant l’hypothèse que l’épaisseur eest négligeable devant le rayon R,onpeutécrirel’opérateur
d’inertie sous la forme :
I(O2,2)#
2C00
0C0
00C
(!x1,!y1,!z1)
où Cest une constante similaire à Aet B.
(C) La valeur de Càlaquestionprécédenteestdonnéepar:
C=ρπeR4
2

(D) Le torseur cinématique du disque 2dans son mouvement par rapport au bâti 0s’écrit, au point
I:
%V(2/0)&=
˙
α!z1+˙
θ!x1
(˙
αL+R˙
θ)!y1
I
(E) En reprenant les notations précédentes, le torseur dynamique du disque 2dans son mouve-
ment par rapport au bâti 0s’écrit, au point O2:
%D(2/0)&=
ML ˙
α!x1
2C˙
θ!x1+C˙
α!z1
O2
Exercice 2
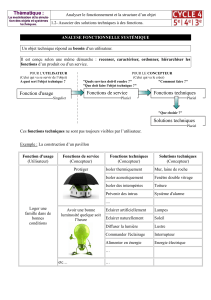
L’objet de cette étude est la cinématique d’un système d’ouverture de barrière schématisé sur la
Figure 2.OnnoteO,A,B,Cles centres des liaisons pivots qui guident les différentes pièces, et a,b,
c,dles distances entre ces points, comme indiqué sur la Figure 2.LebrasBC est en liaison pivot avec
le bâti et solidaire d’un arbre moteur tournant à la vitesse Ω=˙
β.Parl’intermédiairedelabiellette
AB,cebraspermetl’ouvertureetlafermeturedelabarrièreOA.Lapositionestditeouvertelorsque
la barrière est à la verticale (θ=0).
x
d
a
b
c
θδ
β
A
OB
C
Ω
y
Figure 2 – Système d’ouverture de barrière.
(A) On peut montrer qu’une relation entre les angles d’entréeβet de sortie θest donnée par :
b2=a2+c2+d2−2accos(θ−β)+2adcosθ−2cdcos β
(B) Si a+d>b+con peut montrer que le problème précédent n’admet pas toujours de solution.

(C) Si a+b>c+don peut montrer que le problème précédent n’admet pas toujours de solution.
On fournit la relation suivante entre les vitesses de rotation ˙
θet ˙
β:
2cd ˙
βsinβ+2ac(˙
β−˙
θ)sin(β−θ)−2ad ˙
θsinθ=0
(D) Lorsque l’on est proche de la position « barrière ouverte »pouruneconfigurationoùa=cet
b=d,onpeutendéduireque˙
θest proportionnel à ˙
β.
(E) On suppose que la vitesse de rotation ˙
βest constante. On peut alors montrer que l’accélération
angulaire ¨
θest proportionnelle à ˙
β.
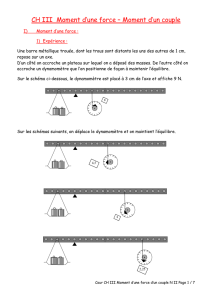
Exercice 3
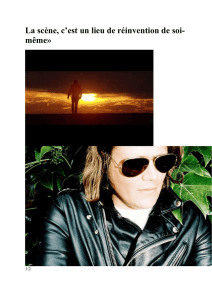
On étudie dans cet exercice le système schématisé sur la Figure 3.Ilcomporteuntambour1’
de rayon rsur lequel est enroulée une corde retenant une masse m.Cetambourestenliaisonpivot
avec le bâti 0,etestsolidaired’unerouedentée1qui constitue l’entrée d’un train épicycloïdal. Les
satellites sont notés 4et 4’,lacouronneextérieure3.Leporte-satellite,encastréaubâti,estnoté0.
Ce système comporte un dispositif de freinage inertiel composé de deux masselottes 2et 2’,cha-
cune étant de masse M.Lesmasselottessontguidéessurl’arbre1par des glissières de direction
radiale et viennent frotter sur la surface intérieure de la couronne 3;onnoteraRle rayon et µle
coefficient de frottement associé. Les ressorts figurés seront négligés : leur fonction est de couper le
système de freinage à faible vitesse. On négligera la masse detouteslespièces,exceptéslesmas-
selottes Met la masse m.Danstoutl’exercice,onnoteraωij la vitesse de rotation de la pièce ipar
rapport à la pièce jautour de l’axe !x.
R
30
ω
M
M
m
Vue du système de
freinage seulement
0
2
2'
1
3
4'
00 2r
1'
4
z
yx
z
Figure 3 – Système de freinage inertiel.

(A) En négligeant l’effort des ressorts, on peut montrer que la somme des couples de frottement
exercés par les deux masselottes sur la couronne 3s’écrit :
C=2µRM ω2
10
(B) On note Zile nombre de dents de la pièce idans le train épicycloïdal présenté. On peut établir
la relation de Willis suivante : ω10
ω30
=−Z1
Z3
(C) Dans l’hypothèse du frottement de Coulomb, le coefficientdefrottementµaugmente avec la
vitesse de rotation grâce aux efforts centrifuges.
(D) Dans l’hypothèse de liaison parfaite entre les solides, la puissance des efforts intérieurs à
l’ensemble (1+2+2’+3+3’+4’)vaut(ausigneprès):
Pint =2µR2Mω3
10 (1+Z1
Z3
)
(E) L’application du théorème de l’énergie cinétique permetd’obtenirlavitesselimitedela
masse m:
vlim =-Z3
Z1+Z3
mgr3
2µM R2
Exercice 4
La Figure 4 montre un schéma de distribution de moteur thermique dans lequel le linguet 5
n’attaque pas la tête de la soupape 1directement mais par l’intermédiaire d’un poussoir 4qui est inséré
entre la soupape et le linguet. La came, qui n’est pas représentée, exerce un effort au point Bvia le
galet 6.AupointCle linguet est en liaison pivot avec le bâti 0.Unressortdecompression3assure la
fermeture de la chambre de combustion lorsque l’effort de la came sur le linguet est supprimé. L’insert
2est solidaire du bâti et constitue une glissière parfaite. Ondistingueratroispartiesparticulièressur
la soupape : la tête, le corps, le pied, comme indiqué sur la figure de droite.
On s’intéresse aux déformations de compression engendrés dans la soupape 1et dans le poussoir
4et pour cela on fait les hypothèses suivantes :
–lesliaisonssontparfaites;
–onpeuteffectuerlecalculdeprédimensionnementenstatique ;
–lapressionpmax due à l’explosion ne s’exerce que sur la surface inférieure delasoupape,
comme indiqué sur la figure de droite. Axialement, la soupape est donc soumise au total aux
efforts du poussoir, du ressort, et à la pression pmax ;
–onnégligelesdéformationsdanslepieddesoupape,cequisignifie que la déformation de
celle-ci correspond uniquement à la déformation du corps ;
–onnoteLla longueur du corps de soupape, et lcelle du poussoir.
(A) L’analyse en statique de la soupape permet de montrer que la raideur kdu ressort est d’une
importance primordiale sur l’allongement ΔLde la soupape.
(B) Sous les hypothèses formulées, on peut montrer que l’allongement ΔLdu corps de soupape
vaut :
ΔL=−pmax LD2
Ed2
où Eest le module d’Young, Dle diamètre du pied et dle diamètre du corps de la soupape.
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%