Comment la WII peut-elle sauver le monde

OLYMPIADES DE PHYSIQUE
Comment la Wii peut-elle
sauver le monde ?
Une solution d’autofreinage pour ascenseur pour
plus de sécurité
Charline Dumont, Arniko Meinhold, Jeanne Oberlé
2013-2014
Qui ne connaît pas la fabuleuse manette de Wii ? Chacun sait très bien quelle est cette
merveilleuse console qui a révolutionné le monde pour tous les grands adeptes de jeux
vidéo. Le principe est génial : le mouvement effectué par le joueur est capté puis
retransmis de sorte à ce que l'avatar du joueur effectue le même mouvement. Toutefois,
la question se pose : comment cela est-il possible ?? Quel est donc l'ingénieux système qui
retranscrit nos mouvements frénétiques dans Mario Kart ??

Page 2
Sommaire
Pages
Introduction
Quelle est la composante de la console qui permet de
retransmettre nos mouvements sur l’écran ?
3
Un fabuleux capteur d’accélérations
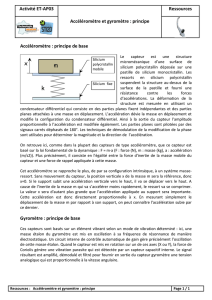
Qu’est-ce qu’un accéléromètre ? Et une accélération alors ?
Comment fonctionne réellement un accéléromètre ?
Mais comment peut-on fabriquer des éléments aussi précis à une
échelle si minuscule ?
Peut-on trouver des accéléromètres autre part que dans les
consoles de jeu ?
4
5
6
7
Notre accéléromètre
Quelles sont les caractéristiques de notre accéléromètre ?
Quelle est la corrélation entre les valeurs d’entrée et de sortie ?
Mais comment disposer d’une accélération de valeur connue ?
Notre montage d’étalonnage
Modélisation et incertitudes
8
9
9
10
11
Notre projet et sa réalisation
Et dans la vraie vie, à quoi donc pourrait nous servir cet
accéléromètre ?
Qu’est-ce qu’une chute libre ?
Détection d’une chute et freinage de notre ascenseur
Principe de fonctionnement de notre montage
La réalisation de notre maquette
Et le freinage alors ?
Vous avez dit courants de Foucault ?
12
12
13
14
15
17
17
Ouvertures
Notre accéléromètre serait-il défectueux ?
Pourrions-nous utiliser l’accéléromètre à des fins de commande ?
Remerciements
18
19
20

Page 3
Comment la Wii peut-elle sauver le
monde ?
Qui ne connaît pas la fabuleuse manette de Wii ? Chacun sait
très bien quelle est cette merveilleuse console qui a révolutionné le
monde pour tous les grands adeptes de jeux vidéo. Le principe est
génial : le mouvement effectué par le joueur est capté puis retransmis
de sorte à ce que l'avatar du joueur effectue le même mouvement.
Toutefois, une question se pose : comment cela est-il possible ?? Quel
est donc l'ingénieux système qui retranscrit nos mouvements
frénétiques dans Mario Kart ??
Le document qui suit est le fruit de nos recherches d'investigation, et
à chaque étape de notre démarche correspond une interrogation,
signalée par l'icône :
comme le W de What (et de Wii)
Quel est la composante de la console qui permet de
retransmettre nos mouvements sur l'écran?
Le mouvement est détecté par l'accéléromètre de la Wii, qui est présent dans la manette utilisée
par le joueur. L'information est ensuite transmise par Bluetooth jusqu'à la console qui va jouer le rôle
de l'interface qui reçoit et retravaille les données pour que l'image de l'avatar sur l'écran effectue les
mouvements correspondants à l’orientation, à la rotation et au déplacement de la manette. Cette
retransmission est très rapide (de l’ordre de la dizaine de ms), ainsi dès que le joueur descend le bras
ou tourne vers la gauche, son avatar accomplit presque instantanément les mêmes gestes.
Nous nous sommes alors étonnés de la détection si précise et rapide du mouvement, et donc plus
particulièrement sur la nature de l'accéléromètre, ce qui nous conduit à la prochaine étape.

Page 4
Un fabuleux capteur d’accélérations
Qu'est-ce qu'un accéléromètre?
Un peu de théorie et un exemple de modèle
Un accéléromètre est, comme son nom l'indique, un appareil capable de mesurer une
accélération et de la convertir sous forme de signal électrique (on parle de transducteur).
Par conséquent, l'accéléromètre est une interface entre une grandeur physique et une information
manipulable. Toutefois il est uniquement capable d’acquérir des données et non de les traiter. Son
fonctionnement se base sur des principes électroniques et mécaniques, c’est pourquoi on le nomme
dispositif électromécanique.
Cet appareil est parfois appelé accéléromètre MEMS, ce qui signifie Micro Electronical Mechanical
System. Le système est réellement mécanique et son fonctionnement s'appuie sur des systèmes
mécaniques simples : par exemple le déplacement d'une masse à l'intérieur d'un compartiment (Figure
1). Cette masse est suspendue à un ressort et la mesure des modifications de l’allongement de ce
dernier permet de calculer l'accélération subie à une date t donnée.
Mais qu’est-ce qu’une accélération ?
On parle d’une grandeur vectorielle
appelée accélération (dont l’unité est le m.s
-
²), dès lors que le
vecteur vitesse change. En effet on définit la vecteur accélération de la manière suivante :
.
Il
s’agit en d’autres termes du taux de variation temporel du vecteur vitesse.
La notion d’accélération, qui s’évalue dans un référentiel donné (qu’il soit galiléen ou non), est donc
liée soit à une augmentation (ou une diminution) de la valeur numérique de la vitesse, soit à une
modification de la trajectoire.
Un accéléromètre va en l’occurrence détecter puis quantifier les modifications du vecteur vitesse
.
Par exemple, on aura pour un mouvement rectiligne une accélération positive due à un déplacement
plus rapide, une accélération négative due à un freinage, une accélération nulle si la vitesse est
uniforme…Mais si la géométrie de la trajectoire est modifiée, l’accélération variera aussi.
Figure 1

Page 5
Un mouvement quelconque est décrit par un nombre fini de translations et de rotations. Aujourd’hui,
certaines manettes et même certains téléphones portables sont dotés d’accéléromètres munis de 6
degrés de liberté, c’est-à-dire qu’ils peuvent mesurer des accélérations dans toutes les directions de
l'espace. Les accéléromètres peuvent ainsi mesurer des déplacements mono- (seulement sur l’axe des
abscisses, par exemple juste de gauche à droite), bi- (abscisse et ordonnée, de gauche à droite et de bas
en haut) ou tridimensionnel (axe z supplémentaire, on introduit la dimension de profondeur), et
prennent en compte tous les types de rotation (Figure 2)
Sur la Figure 3, on observe que l'axe z est maintenant à la place du compartiment de l'axe x. Notre
modèle a donc tourné d'un quart de tour vers la droite. Pendant cette rotation, les accéléromètres dans
les compartiments x et z ont donc mesuré des accélérations.
Le système mécanique précédemment proposé n'est qu'une modélisation à une échelle bien supérieure
à ce qui se fait réellement dans un accéléromètre. En effet, aujourd'hui, un accéléromètre mesure
environ 3mm², et ceci prend en compte le boîtier extérieur!
Comment fonctionne réellement un accéléromètre?
Observons maintenant l'intérieur d'un de ces appareils électroniques minuscules.
Le modèle présenté ci-dessus est mis en œuvre à l’échelle microscopique. Une partie mobile est
présente à l'intérieur d'un compartiment fixe :
Lorsque l'objet sur lequel est placé l'accéléromètre bouge, la partie mobile (ici l'élément bleu, façonné
en silicium, donc malléable) va se déplacer et entrer en contact avec les parties vertes. On peut ainsi
comparer cet ensemble à une multitude d’armatures reliées à autant de mini-condensateurs. Par le
déplacement de la masse de silicium en raison d’un mouvement, il va alors s'opérer un changement de
la capacité électrique de ces condensateurs de l’ordre de 10
-14
F (Figure 5), et la tension de sortie de
l’accéléromètre va en conséquence être modifiée. Par conséquent, plus il y aura d’armatures, plus la
sensibilité de l’accéléromètre et donc la mesure du mouvement du mobile sera précise.
F
igure 2
Figure 3
Figure 4
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%