chapitre4

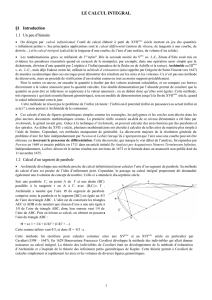
INTEGRATION NUMERIQUE
1

1- On lance une fusée verticalement du sol et l’on mesure
l’accélération pendant les premières 80son obtient le tableau
suivant :
Calculer la vitesse de la fusée à l’instant t= 70s
2- calculer l’intégrale:
T(s) 0 10 20 30 40 50 60 70 80
ɤ(m/s2)30 31,63 33,44 35,47 37,74 40,33 43,29 46,70 50,67
dxe
x
xx5.0
2
0
2/3
)sin(.5,01
)1cos(2
2

Dans certaines situations, le calcul de l’intégrale
d’une fonction est difficile voir même impossible,
ceci est étant dû, soit à l’expression analytique
complexe de la fonction, ou du fait que
l’intégrande n’est pas donné sous forme
analytique, mais numériquement en un nombre de
valeurs discrètes.
D’où la nécessité d’approcher cette intégrale
numériquement.
3

Les méthodes numériques d'intégration d'une
fonction sont nombreuses et les techniques très
diverses.
Dans ce chapitre, on s’intéressera aux méthodes des
rectangles, des trapèzes et de Simpson.
4

Méthode des rectangles
La méthode consiste à diviser l’intervalle [a,b] en n
parties et à approximer la surface de chaque tranche
par un rectangle.
x
y
y y y y y
0 1 23n-1
…
x x x x x
0123n-1
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
1
/
36
100%