Notes de Cours PS 91 Forces I. Forces `a distance

UTC PS91
Notes de Cours PS 91
Forces
I. Forces `a distance
I. 1 Attraction gravitationnelle
Deux corps ponctuels de masses respectives mAet mBs’attirent avec des forces de mˆemes valeurs
(mais vectoriellement oppos´ees), proportionnelles `a chacune des masses, et inversement proportion-
nelle au carr´e de la distance qui les s´epare. Cette force a pour direction la droite passant par Aet
B. La force exerc´ee par Asur Bs’´ecrit
~
FA/B =−G mAmB
r2~ur
o`u ~r =−−→
AB et ~urest le vecteur unitaire de Avers B:~ur=~r/r o`u r=k~rk. La constante
gravitationnelle vaut G= 6,6742 ×10−11N.m2.kg−2. On peut g´en´eraliser pour un syst`eme Sde
masses ponctuelles mi,i= 1,2,3... et la force exerc´ee par le syst`eme sur un corps ponctuel Avaut
alors ~
FS/A =−X
i
GmAmi
r2
i
~uri=mA~g o`u ~g =−X
i
Gmi
r2
i
~uri
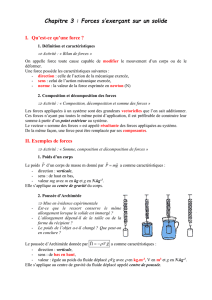
est le champ de gravit´e au point A. Si le syst`eme de masse mest une sph`ere homog`ene (densit´e
volumique constante) de centre O, alors la force exerc´ee sur Aa pour direction la droite passant par
Oet Aet ~
FS/A =mA~g o`u ~g =−G m
r2~ur
o`u ~r =−→
OA et ~urest le vecteur unitaire de Overs A. Par exemple, `a la surface de la Terre :
k~gk= 9,81m.s−2.
m1
m2
m3
m4
~r1
~r2
~r3
~r4
~r
O
A
A
Figure 1 – Champ de gravit´e en Adˆu `a un syst`eme de masses ponctuelles (`a gauche) et une sph`ere
homog`ene de centre O(`a droite).
1

UTC PS91
I. 2 Force ´electromagn´etique
Force ´electrostatique de Coulomb
Toute charge qAau point Aexerce sur une charge qBau point Bimmobile une force,
appel´ee force de Coulomb de la forme :
~
FA/B =1
4πε0
qAqB
r2~ur
o`u ε0= 8,854 ×10−12 F.m−1est la permittivit´e ´electrique dans le vide.
Ainsi la force est attractive si qAqB<0et r´epulsive si qAqB>0. On peut g´en´eraliser pour un
syst`eme Sde charges ponctuelles qi,i= 1,2,3... et la force exerc´ee par le syst`eme sur Avaut alors
~
FS/A =X
i
1
4πε0
qAqi
r2
i
~uri=qA~
Eo`u ~
E=1
4πε0X
i
qi
r2
i
~uri
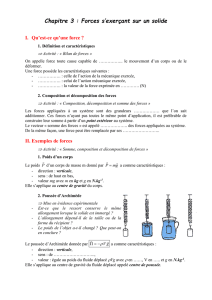
est le champ ´electrique au point Acr´ee par l’ensemble des charges qi.
Figure 2 – Lignes de champ d’un dipˆole ´electrique (`a gauche) et produites par deux charges positives
2qet q(`a droite).
2

UTC PS91
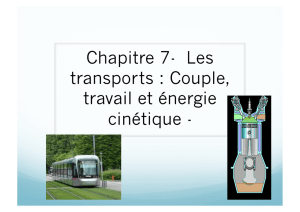
Force magn´etique
Force s’exer¸cant sur une particule charg´ee qanim´ee d’une vitesse ~v en pr´esence d’un
champ magn´etique ~
B(en Tesla) :
~
F=q~v ∧~
B
Cons´equence : la force magn´etique est toujours perpendiculaire `a la vitesse et au champ magn´etique.
Figure 3 – Action de la force magn´etique sur une particule anim´ee d’une vitesse initiale horizontale.
Force de Lorentz
Force s’exer¸cant sur une particule charg´ee qanim´ee d’une vitesse ~v en pr´esence d’un
champ ´electromagn´etique (~
E, ~
B):
~
F=q(~
E+~v ∧~
B)
I. 3 Int´eraction nucl´eaire
L’interaction forte est responsable de la coh´esion du noyau. Sans elle, les forces de r´epulsions
´electromagn´etiques entre protons feraient ´eclater le noyau. La port´ee de l’interaction forte est d’en-
viron 10−15m, c’est-`a-dire la taille d’un noyau atomique. C’est cent fois plus que l’interaction faible,
mais n´egligeable devant les port´ees infinies de la gravitation et de l’interaction ´electromagn´etique.
L’interaction forte est la plus forte des interactions fondamentales. Sa constante de couplage est
environ cent fois plus grande que celle de l’interaction ´electromagn´etique, un million de fois plus que
celle de l’interaction faible, et 1039 fois plus que celle de la gravitation.
L’interaction faible est responsable de la d´esint´egration radioactive de particules subatomiques et
est `a l’origine de la fusion nucl´eaire dans les ´etoiles. Cette force fondamentale est la plus faible des
interactions non gravitationnelles. Aux ´energies habituellement consid´er´ees en physique nucl´eaire, on
la mod´elise par une interaction effective simplifi´ee (force de Fermi) dont la constante de couplage est
environ 10 000 fois moindre que celle de l’interaction ´electromagn´etique et 1 000 000 fois moindre que
celle de l’interaction nucl´eaire forte. Cela s’explique entre autres par le fait que son champ d’action
est tr`es limit´e.
3

UTC PS91
II. Forces de contact
II. 1 Contact entre solide : force de frottement sec
Le frottement repr´esente l’action d’une surface rigide sur un solide, action qui s’oppose
au mouvement du solide par rapport `a la surface. La force exerc´ee par la surface sur le
solide est la somme de la r´eaction normale ~
Net la force de frottement ~
f:
~
R=~
N+~
f
~
N
~
R
~
f
~v
Figure 4 – Force de frottement.
L’exp´erience montre qu’il faut distinguer deux cas : le cas statique ~v = 0 et le cas dynamique ~v 6= 0.
Force de frottement dynamique
La loi de Coulomb dynamique des frottements (d´eduite des observations) s’´ecrit :
~
f=−µdk~
Nk~v
k~vk
o`u ~v d´esigne la vitesse relative du point de contact du solide par rapport `a la surface et µdest le
coefficient de frottement dynamique qui d´epend de la temp´erature et l’´etat de surface de contact et
de la nature des surfaces.
Force de frottement statique
Si on exerce sur un corps immobile une force ~
Fext d’intensit´e croissante, l’exp´erience montre que
tant que k~
Fextk ≤ fmax (force d’arrachement), le corps reste immobile. Dans ce cas, on observe que
k~
fk ≤ µsk~
Nk=fmax
o`u µsest le coefficient de frottement statique qui d´epend de la nature et de l’´etat des surfaces en
contact. En g´en´eral µs≥µd.
Condition de contact et d´ecollement
On peut toujours ´ecrire l’effort normal : ~
N=N~n o`u ~n est le vecteur unitaire normal `a la paroi
orient´e vesr le corps et N≥0. La condition de d´ecollement est donn´ee par N= 0. En pratique,
on cherche, sous l’hypoth`ese qu’il y a contact, `a quelle condition N < 0, ce qui est physiquement
inacceptable et siginifie que l’hypoth`ese n’est plus valable.
4

UTC PS91
II. 2 Contact entre solide et fluide
Force de pression
Les mol´ecules constituant un fluide (gaz ou liquide) sont en perp´etuel mouvement. Les
particules bougent sans cesse, dans toutes les directions et au gr´e des chocs. La pression
pest la force moyenne par unit´e de surface due aux particules venant frapper une paroi.
Ainsi un solide ou une surface δS en contact avec un fluide subit une force dirig´ee selon
la normale ~n `a la surface :
δ~
Fp=p δS~n
Il faut noter que la pression peut ne pas ˆetre constante dans le fluide et d´epend du point Mou elle
s’applique, on note p=p(M). Dans le cas d’une surface plane Ssoumise `a une pression constante
alors on a simplement ~
Fp=p S~n. La pression se mesure en Pascal (Pa) et 1 Pa = 10−5bar = 1
N.m−2.
Bouteille de gaz : Une bouteille de volume Vest remplie d’un gaz maintenu `a la temp´erature T
(en Kelvin (K)). La pression `a l’int´erieur de la bouteille est constante et v´erifie l’´equation des gaz
parfaits :
pV =nRT
o`u R= 8,3144621J.K−1.mol−1et nest la quantit´e de mati`ere (en mole).
Barrage hydraulique : A la profondeur hpar rapport `a la surface libre, la pression de l’eau dans le
barrage v´erifie la relation fondamentale de la statique :
p(h) = p0+ρegh
o`u p0est la pression atmosph´erique (environ 1 bar) et ρeest la masse volumique de l’eau (ρe≈
1000kg.m−3). La force r´esultante sur l’ensemble du barrage est donn´ee par l’int´egrale de surface
~
Fp=Zbarrage
p(h)~n dS
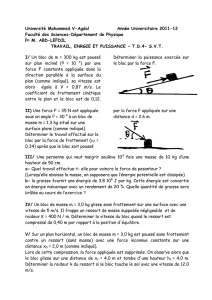
Pouss´ee d’Archim`ede :
Tout corps plong´e dans un fluide au repos, enti`erement mouill´e par celui-ci ou traversant
sa surface libre, subit une force verticale, dirig´ee de bas en haut et oppos´ee au poids
du volume de fluide d´eplac´e ; cette force est appel´ee pouss´ee d’Archim`ede. Le point
d’application de cette force est le centre ce masse du fluide d´eplac´e.
bouteille de gaz
sous pression
barrage hydraulique poussée d’Archimède
Figure 5 – Illustrations.
5
 6
7
6
7
1
/
7
100%