Statique du solide

Menina Rachid 1 02/01/2014
S
ST
TA
AT
TI
IQ
QU
UE
E
D
DU
U
S
SO
OL
LI
ID
DE
E

Menina Rachid 2 02/01/2014
I. Axiomes de la statique du Solide
1.1 Objet de la Statique
La Statique est la partie de la mécanique qui permet d’examiner les conditions d’équilibre des
corps sous l’action des systèmes de forces.
Dans tout ce qui suit on considère les solides indéformables.
1.2 Systèmes de forces
1.2.1 Définition
On appelle Système de Forces tout ensemble de forces agissant sur un même solide.
Notation conventionnelle :
NnFFFF n ,.....,,, 321
1.2.2 Équivalence des Systèmes
Si l’effet de
,.....,,, 321 n
FFFF
sur un solide (S) est le même que celui de
,.....,,, ''
3
'
2
'
1'
n
FFFF
n et n’ pouvant être différents, alors les deux systèmes sont dits équivalents et on note :
,.....,,, ,.....,,, ''
3
'
2
'
1321 '
n
nFFFFFFFF
1.2.3 Résultante :
Si
FFFFF n
,.....,,, 321
alors
F
est la résultante de
n
FFF ,.....,,21
. Donc, la résultante
est la force qui, à elle seule, peut remplacer l’ensemble des forces du système.
Remarque :
Il y a une différence entre la Somme Géométrique (souvent désignée par Vecteur Principal)
et la Résultante.
1.2.4 Système de forces équilibré :
Si sous l’action de
,.....,,, 321 n
FFFF
un solide libre (S) est au repos (ou en mouvement
uniforme), le système est dit équilibré.
Notation :
,.....,,, 321 n
FFFF
est équilibré
0 ,.....,,, 321 n
FFFF
Cette notation exprime en fait que l’effet du système sur (S) est nul.
Remarques :
a) Un solide libre est un solide non lié à d’autres et qu’on peut, à partir d’une position,
déplacer dans tout l’espace.
b) Si
FFFFF n
,.....,,, 321
alors
0 ,,.....,,, 321 FFFFF n
.

Menina Rachid 3 02/01/2014
1.3 Axiomes de la Statique :
1.3.1 1ier Axiome :
Un solide (S), sur lequel agit un système de deux forces
21 et FF
, ne peut se trouver en
équilibre que dans les cas où :
opposés. sens
etdirection même
,
21 FF
Autrement dit :
0, 21 FF
: 2 présententsecas
1.3.2 2ième Axiome :
L’action d’un système de forces donné sur un solide ne changera pas si on ajoute à ce système
ou si on lui retranche un système de forces équilibré.
Soit
,.....,,, 321 n
FFFF
et
,.....,,, ''
3
'
2
'
1'
n
FFFF
appliqués sur (S) avec
0 ,.....,,, ''
3
'
2
'
1'
n
FFFF
,
alors
,.....,,,....., ,.....,,, ''
11321 '
n
nn FFFFFFFF
.
Conséquence (Principe de Glissement) :
Sans changer l’action d’une force sur un solide, on peut transporter le point d’application de
cette dernière le long de sa ligne d’action en un autre point « quelconque » du solide.
En effet soit (S),
A
F
appliquée en A sur (S) et B un point de la ligne d’action de
A
F
.
BBBABBAA FFFFFFFF
,, ,,
0 0
NB : le principe de glissement n’est utilisable qu’en Statique.
21 FF
(S
)
2
F
1
F
21 FF
(S
)
2
F
1
F
ou
B
F
(S)
A
F
A
B
(S)
A
F
A
B
(S)
B
F
A
B
actiond' ligne même
AB FF
B
F

Menina Rachid 4 02/01/2014
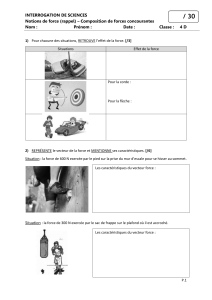
1.3.3 3ième Axiome (Principe du Parallélogramme) :
Deux forces, agissantes sur un solide en un même point, admettent une résultante appliquée
en ce point et représentée par la diagonale du parallélogramme ayant ces forces comme cotés.
RFF
21,
;
21 FFR
Le module et la direction de
R
se déterminent à partir
des lois de sinus et de cosinus.
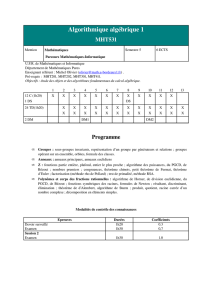
1.3.4 4ième Axiome (Principe d’action-réaction) :
Soient deux solides (S1) et (S2) en contact entre eux.
Si (S1) agit sur (S2) avec une force
12
F
alors
(S2) agira sur (S1) avec une force
21
F
telle que
2112 FF
1.3.5 5ième Axiome (Principe de durcissement) :
Si sous l’action d’un système de forces un corps déformable se trouve en équilibre alors ce
dernier ne sera pas rompu si le corps durcira.
Ce principe permet la résolution des problèmes d’équilibre des corps déformables tels que
courroies, câbles, chaines etc.
1.4 Liaison et réaction de liaison/ Principe de suppression des liaisons:
Liaison et réaction de liaison :
Un corps lié à d’autres corps ou en contact avec eux est limité dans son mouvement. Il est
soumis à des liaisons et on dit qu’il est gêné ou non-libre.
Physiquement, on appelle liaison tout ce qui limite les déplacements d’un corps donné ou
permet de le maintenir dans une position bien déterminée dans l’espace. Une liaison est ce
que l’on désigne communément par appui.
Exemple : brosse sur une table
Si on applique sur un corps gêné (soumis à une liaison par exemple) un système
,.....,,, 321 n
FFFF
, il agira sur la liaison avec une certaine force qui dépendra du système.
Réciproquement (4ième axiome), la liaison agira sur le corps avec une force opposée.
Pour l’exemple de la brosse-table, si on considère uniquement le poids de la brosse, la
réaction de la table sera normale à la surface de contact, si la surface de contact est
R
2
F
1
F
(S)
M
S1
S2
21
F
12
F
R
Liaison physique= table

Menina Rachid 5 02/01/2014
horizontale. Par contre, si le contact n’est pas horizontal et si on tient compte du frottement le
système appliqué se composera de deux forces. La réaction sera oblique avec 2 inconnues: la
normale et la force due au frottement qui permet de maintenir l’équilibre tant qu’elle reste
supérieure à la composante du poids suivant le plan de contact.
La détermination de la force de liaison dite aussi réaction, inconnue à priori en intensité et
parfois en direction doit faire partie de la résolution du problème considéré.
En statique il est important de déterminer correctement les réactions et celles-ci dépendent des
types de laissons qui rentrent en jeu.
Différents types d’appuis :
Dans ce cours, et pour une raison de simplicité, on se limitera à la représentation
conventionnelle des appuis (avec leurs réactions), à savoir :
1. surface lisse ou appui simple :
2. charnière cylindrique ou appui double (dans le plan):
3. rotule sphérique et crapaudine (système non coplanaire):
R
y
x
R
R
2 composantes dans le plan du système
x
z
R
y
z
y
x
R
3 composantes non coplanaires
N
N
1
N
2
N
1 composante perpendiculaire aux « surfaces de contact »
Direction de la
réaction
Surface lisse
Appui simple
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%