Stage - DLST

Rapport de stage
Stage excellence au Gipsa-lab
FRANCOU Mathias
Juin 2012

2
SOMMAIRE
Introduction..............................................................................................................................................................4
Le laboratoire ...........................................................................................................................................................4
Ma mission ...............................................................................................................................................................4
Mon vécu ..................................................................................................................................................................5
Conclusion ................................................................................................................................................................6
La suite du document est le travail effectué lors du stage
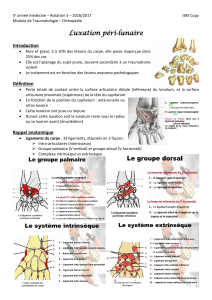
LE POIGNET ..............................................................................................................................................................7
Le poignet ............................................................................................................................................................ 7
Présentation anatomique ............................................................................................................................... 7
Les ligaments ............................................................................................................................................... 8
Stabilité et instabilité ...................................................................................................................................... 9
Les mouvements ........................................................................................................................................... 10
Dynamique du carpe ..................................................................................................................................... 10
La colonne du scaphoïde ........................................................................................................................... 11
Colonne du lunatum .................................................................................................................................. 11
Le couple scaphoïde-lunatum ................................................................................................................... 12
La colonne du triquetrum ......................................................................................................................... 12
Mécanisme de la flexion ........................................................................................................................... 13
Mécanisme de l’extension ........................................................................................................................ 13
Mécanisme d’abduction ............................................................................................................................ 14
Mécanisme de l’adduction ........................................................................................................................ 14
Quantification des mouvements ................................................................................................................... 15
Cinématique du poignet ............................................................................................................................ 15
Le carpe à double cupule : illustration de la géométrie variable du carpe ............................................... 17

3
L’arthrodèse des 4 os ........................................................................................................................................ 19
Principe de l’opération .................................................................................................................................. 19
Résultat sur l’arthrodèse des 4 os dans la littérature ................................................................................... 19
Arthrodèse carpienne des quatre os versus arthrodèse capitolunaire ..................................................... 20
Comparison between proximal row carpectomy and four-corner fusion for treating osteoarthrosis
following carpal trauma : a prospective randomized study ...................................................................... 21
Prothèse AMANDYS® ......................................................................................................................................... 21
Description .................................................................................................................................................... 22
Les indications ........................................................................................................................................... 22
Le concept ................................................................................................................................................. 22
Le pyrocarbone ......................................................................................................................................... 22
L’opération ................................................................................................................................................ 22
Taille .......................................................................................................................................................... 23
Etude ............................................................................................................................................................. 23
SOURCES ........................................................................................................................................................... 24

4
INTRODUCTION
Etant très intéressé par la biomécanique, j’ai choisi d’effectué mon stage dans un laboratoire de biomécanique.
C’est donc auprès de Gipsa-lab que j’ai fait ma demande. Suite à mes recherches, je savais que le travail de
cette équipe portait sur la modélisation du geste humain. C’est ce travail de relation entre anatomie et
biomécanique qui m’a attiré et m’a poussé à réaliser mon stage dans ce laboratoire.
LE LABORATOIRE
Le laboratoire Gipsa-lab est une unité de recherche mixte du CNRS, de Grenoble-INP, de l'université Joseph
Fourier et de l'université Stendhal, elle est conventionnée avec l'INRIA, l'Observatoire de Grenoble et
l'université Pierre Mendès France. Fort de 300 personnes dont plus d'une centaine de doctorants, GIPSA-lab est
un laboratoire pluridisciplinaire développant des recherches fondamentales et finalisées sur les signaux et
systèmes complexes. Il est reconnu internationalement pour ses recherches en automatique, signal et
images, parole et cognition et développe des projets dans les domaines stratégiques de l'énergie, de
l'environnement, de la communication, des systèmes intelligents, de la santé et de l'ingénierie linguistique. De
par la nature de ses recherches, Gipsa-lab maintient un lien constant avec le milieu économique via un
partenariat industriel fort. Son potentiel d'enseignants-chercheurs et chercheurs est investi dans la formation
au niveau des universités et écoles d'ingénieurs du site grenoblois.
Gipsa-lab regroupe trois départements de recherche :
- Automatique
- Image et signal
- Parole et cognition
Mon stage s’est déroulé au sein du département automatique, qui regroupe différentes équipe de recherche
dont l’équipe Signal et Automatique pour la surveillance, le diagnostic et la biomécanique (SA-IGA) qui m’a
accueillie. Cette équipe mène des recherches sur l'analyse et la modélisation des systèmes complexes. Ces
travaux portent sur la compréhension, la surveillance, le diagnostic et la sûreté des systèmes industriels,
naturels et biomécaniques vivants. J’ai donc été intégré dans l’équipe de travail sur la biomécanique dirigé par
Franck QUAINE, mon maitre de stage. C’est une petite équipe de travail.
MA MISSION
Je suis arrivé dans une période du laboratoire, où il n’y avait plus d’expérimentation, les chercheurs de l’équipe
sont en train de rédiger ou d’analyser les résultats des précédentes expériences faites. Mon maitre de stage
m’a donc donné pour mission une recherche bibliographique sur un sujet pour un projet de thèse. La thèse est
préparée par un chirurgien de la main du centre hospitalier universitaire de Grenoble, Denis CORCELLA. Le
sujet est l’étude d’une nouvelle chirurgie du poignet, en comparaison avec les autres chirurgies préexistantes
et le poignet sain. La thèse est encore vraiment à l’état de commencement, le sujet n’est pas encore
réellement défini. Mon travail a donc consisté à une recherche bibliographique générale sur le carpe, le
poignet. Franck Quaine voulait que je regarde le sujet sous un œil plus biomécanique que médical, affin de
trouver des outils biomécaniques pour l’étude de ces opérations.
Ma démarche a tout d’abord débuté sur une recherche générale sur le carpe et le complexe articulaire du
poignet. Il m’a fallu, avant de chercher à comprendre les opérations chirurgicales, analyser le comportement

5
biomécanique du carpe sain. J’ai donc cherché les travaux réalisé dans ce domaine sur les bases de données
que le laboratoire a à sa disposition. Ensuite j’ai cherché plus précisément les moyens d’étude biomécanique
qui ont été utilisé en essayant de faire un lien avec le sujet qui m’était attribué. J’ai ensuite du lire beaucoup
d’article chirurgicaux, nécessaire pour la compréhension des opérations du poignet que j’étudiais.
Mes recherches ont donc été essentiellement de la lecture d’articles à la fois chirurgicaux et biomécanique, en
français comme en anglais. Dans la première partie du stage j’ai fait essentiellement la lecture de ces articles en
rebondissant d’un article à l’autre. C'est-à-dire qu’un article me lançait sur une idée de recherche et ainsi de
suite. Cette méthode ma permis de me faire une idée globale sur le sujet et de me constituer un corpus
d’article. Dans la deuxième partie j’ai rédigé le dossier qui suit, c’est en fait le résumé des articles. Cela m’a
demandé une lecture plus approfondie et ciblé sur les points biomécaniques. Il ne s’agissait donc pas de
résumé de façon simple, mais d’essayer de prendre essentiellement les éléments qui permettent une analyse
et une étude biomécanique du sujet.
Chaque semaine, je faisais un petit bilan avec le maitre de stage pour montrer l’avancement de mes recherches
et l’orientation du travail pour la suite. En fin de stage, j’ai rencontré le chirurgien pour lui présenter la
bibliographie que j’ai construite au cours du mois. Je lui ai donc donné le dossier qui suit.
MON VECU
Quand on m’a proposé ce stage, je l’ai tout de suite vu comme une opportunité que j’étais obligé d’accepter. Et
en effet je ne suis pas du tout déçu par cette proposition de l’université. Cela permet de découvrir une
profession qu’on ne peut pas découvrir dans le cadre des études mis à part une fois rentrer dans la filière
recherche. Il est, pour ma part, vraiment intéressant de voir à quoi ressemble ce métier avant de s’engager
dans la filière. J’ai donc vu ce stage comme une aide pour mon orientation future.
J’ai toujours été attiré par ce métier de chercheur sans finalement savoir réellement en quoi consiste ce métier.
Ce stage m’a donc permis d’apercevoir le contenu et le fonctionnement de ce métier. Ma première observation
était de me dire qu’il portait bien son nom ! En effet, il s’agit vraiment de chercher. Cette méthode de travail
me convient vraiment. En effet dans toutes les activités que je pratique, j’ai tendance à fonctionner de façon
autodidacte, apprendre par soi même en cherchant les connaissances. A mon opinion la recherche fonctionne
un peu ainsi. C'est-à-dire que sans forcément avoir les connaissances sur le sujet au commencement du stage,
j’ai pu tout au long du stage emmagasiner des connaissances pour réfléchir sur le sujet, produire un travail
raisonné et avoir une démarche scientifique. C’est l’image que j’ai eu de la recherche au cours de mon stage.
Mon orientation vers un laboratoire de biomécanique, s’est fait assez naturellement. J’ai toujours eu une
grande attirance pour le fonctionnement mécanique du corps humain et pour l’anatomie. Je voulais donc
découvrir la consistance réelle de la recherche en biomécanique, confirmer ou infirmer la vision que j’en avais.
Cette vision un peu floue s’est précisée pendant toute la durée du stage. C’est vraiment un travail qui fait le lien
entre mécanique et anatomie, et qui me plait énormément.
J’ai eu l’occasion durant mon stage d’apercevoir aussi plusieurs autres éléments du métier que celui dans
lequel j’étais investi. J’ai observé une réunion d’équipe, où les aspects d’organisation était abordés, le point
financier, les différentes thèses prévues, etc... Il y a eu au cours du moi une seule après midi d’expérimentation
que j’ai pu observer. Il s’agissait d’une expérience sur un patient opéré à l’avant bras d’un transfert tendineux
(sujet d’une thèse du labo). Il y a plus exactement eu deux expérimentations sur ce patient, une
expérimentation pour l’évaluation du contrôle moteur effectué par un autre chercheur du laboratoire, et une
évaluation de la force des doigts et des mesures d’EMG par l’équipe de biomécanique. Je n’ai cependant pas pu
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%