La recherche à l’Institut Géographique National Activité 2002

La recherche
à l’Institut Géographique National
Activité 2002

La recherche en 2002
01 Classement IGN-SR : 03-001/R-LIV
02 Livre
03 Nom et adresse du directeur de la publication
Jacques Poulain
IGN, Direction Technique
2-4 avenue Pasteur
F-94165 SAINT MANDE CEDEX
04 Rédacteur en chef
Serge Motet
IGN, Direction Technique, Service de la Recherche
2-4 avenue Pasteur
F-94165 SAINT MANDE CEDEX
05 Réalisé au Service de la Recherche de l'IGN
Institut Géographique National
2-4 avenue Pasteur
F-94165 SAINT MANDE CEDEX
06 Titre : La recherche en 2002
07 Date d'édition : 2003/3
13 Numéro 74
15 Nom de la collection : Bulletin d'Information de l'IGN
Résumé
Ce numéro 74 dresse le bilan de l'activité de recherche en 2002 à l'Institut Géographique National. Outre le bilan des quatre
laboratoires de l'IGN, il présente des résultats concernant la restitution automatique des bâtiments en trois dimensions, l'ortho-
photographie à grande échelle, le levé laser aéroporté, la prise de vue aérienne numérique en infrarouge, la correction des mesures
issues du GPS, l'unification d'informations géographiques, l'ordonnancement puis l'évaluation des outils de généralisation automatique,
les logiciels pour l'Internet consacrés à l'information géographique, la mesure du champ de pesanteur terrestre et de la rotation de la
Terre ainsi qu'une analyse de risque appliquée au réseau de métro parisien.
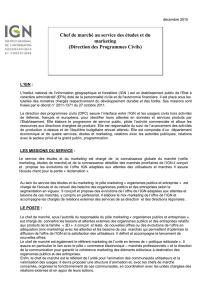
En couverture
Indice de centralité intermédiaire sur le réseau métro+RER de Paris intra-muros dans une logique de desserte uniforme du
territoire. Les valeurs obtenues correspondent à la densité de probabilité de fréquentation des stations et des arcs du réseau pour un
déplacement aléatoire sur le territoire. La loi probabiliste d'un tel déplacement est telle que les stations de départ et d'arrivée sont les
accès au réseau les plus proches d'un couple origine-destination tiré aléatoirement sur le territoire parisien. La gamme des valeurs
s'étend de 0 à 25% (du jaune clair au marron foncé). Seule une partie du réseau est présentée ici sur un extrait IGN du plan de Paris
centré sur le 1er arrondissement.
Mot-clé principal : Information géographique.
Mots-clés : IGN, recherche, cartographie, géodésie, instrumentation, photogrammétrie, SIG, traitement d'image.
Abonnement gratuit, courrier & publications, s’adresser à :
Isabelle Melot
IGN, Direction Technique,
2-4 avenue Pasteur
F-94165 SAINT MANDE CEDEX
BD ALTI, BD CARTO, BD TOPO, BD ORTHO, GÉOROUTE et FEIV sont des marques déposées de l'Institut Géographique National

Table des matières
A. Bilan …………………………………………………………………………………………………………………………. 1
A.1 La recherche à l’IGN (S. Motet) …………………………………………………………………………………….. 1
A.2 Les travaux du laboratoire MATIS (M. Pierrot Deseilligny) ………………………………………………………. 5
A.3 Les travaux du laboratoire OEMI (Ch. Thom) ..……………………………………………………………………. 7
A.4 Les travaux du laboratoire COGIT (A. Ruas) ……..………………………………………………………………. 9
A.5 Les travaux du laboratoire LAREG (M. Kasser) ………………………………………………………………….. 13
B. Quelques actions marquantes …………………………………………………………………………….. 15
B.1 Prototype de logiciel pour la réalisation de BD Bâti 3-D (G. Maillet & D. Flamanc) …………………………. 15
B.2 Fabrication de vraies ortho-images et correction des ombres (D. Boldo) ……………………………………. 25
B.3 Le levé laser aéroporté : techniques, applications et recherche (O. de Joinville,
S. Saur & F. Bretar) ...……….………………………………………………………………………………………. 37
B.4 Un canal proche infrarouge pour la caméra numérique de l’IGN (J.-Ph. Souchon & Ch. Thom) ...……….. 53
B.5 Développement d’un lidar Raman pour le sondage de la vapeur d’eau et la correction des délais
troposphériques en GPS (O. Bock, J. Tarniewicz, Y. Morille, J. Pelon & Ch. Thom) ………………………. 63
B.6 Unification des bases de données géographiques (S. Mustière, N. Gesbert & D. Sheeren) ……………… 71
B.7 L'évaluation de la généralisation (S. Bard) ……………………………………………………………………… 79
B.8 Coordination multi-agents pour la généralisation automatique (C. Duchêne) ……………………………… 87
B.9 Fonctionnalité et vulnérabilité du réseau de métro parisien (J.-F. Gleyze) …………………………………. 97
B.10 « Oxygène » : une plate-forme inter-opérable pour le déploiement
de services Web géographiques (Th. Badard & A. Braun) …..……………………………………………..... 113
B.11 Simulation du champ de pesanteur à partir d'un modèle géologique en trois dimensions :
un outil pour l'évaluation des méthodes de calcul de géoïde (O. Jamet) …………………………………… 123
B.12 Combinaison de séries temporelles des positions des stations et des paramètres
de rotation de la Terre (Z. Altamimi) …………………………………………………………………….……… 131
C. Publications …………………………………………………………………………………………………………134
Thèses de doctorat ……………………………………………………………………………………………………… 134
Rapports de mi-thèse (doctorats) …………………………………………………………………………………… 135
Articles (journaux scientifiques) ……………………………………………………………………………………… 135
Autres articles ……………………………………………………………………………………………………………. 136
Articles parus dans ce bulletin ……………………………………………………………………………………….. 136
Communications à congrès ………………………………………………………………………………………….. 137
Livres ………………………………………………………………………………………………………………………. 138
Chapitres de livres ……………………………………………………………………………………………………… 139
Rapports de stage ……………………………………………………………………………………………………… 139
Rapports internes & comptes rendus ……………………………………………………………………………….. 140


A.1 La recherche à l'IGN
Serge Motet
Ce bulletin n°74 dresse le bilan des activités menées en 2002 par l'Institut Géographique National (IGN) dans le
cadre de sa mission de recherche.
La recherche de l'IGN se caractérise par ses domaines de compétence et ses finalités.
Les domaines sont ceux qu'utilisent l'IGN dans son activité de production : instrumentation pour la topographie et
la localisation, photogrammétrie, traitement d'image, système d'information géographique, cartographie et géodésie.
Concernant les finalités, elles sont déterminées en fonction d'une activité future. Plus précisément, les
connaissances développées par l'IGN visent :
à l'amélioration de la productivité de l'IGN, par exemple : les études sur la détection de changements et la mise
à jour des bases de données ;
•
•
•
•
•
•
•
au développement de nouveaux produits, par exemple : les images de la caméra numérique ou la diffusion des
mises à jour ;
à l'émergence des applications, par exemple : les études sur les risques.
Organisation de la recherche
L'IGN est un établissement public à caractère administratif, dont une des missions est la recherche. Cette
recherche est mise en œuvre au sein de quatre laboratoires :
le laboratoire MATIS : (Méthodes d’Analyse et de Traitement d’Images pour la Stéréorestitution) pour la
photogrammétrie et l'analyse d'image ;
le laboratoire OEMI (Laboratoire d’OptoÉlectronique et de Micro-Informatique) pour l'instrumentation et les
capteurs ;
le laboratoire COGIT (Conception Objet et Généralisation de l’Information Topographique) pour les systèmes
d'information géographique et la cartographie ;
le laboratoire LAREG (LAboratoire de REcherche en Géodésie) pour la géodésie.
Les trois premiers laboratoires se trouvent à Saint-Mandé (Val-de-Marne, 94). Le laboratoire LAREG est une
unité de l'Ecole nationale des sciences géographiques (ENSG) et se situe donc à Marne-la-Vallée (Seine et Marne, 77).
L'orientation et l'évaluation de la recherche sont soumises à un Comité scientifique et technique placé auprès du
Directeur général.
Quelques points marquants
En traitement d'image, l'année a été marquée par le démarrage significatif des études sur le laser aéroporté et le
lancement des recherches sur les modèles de bâtiments à partir de données issues de levés terrestres, photogram-
métriques ou laser.
En instrumentation, on notera les premiers résultats de l'activité d'analyse de concentration de vapeur d'eau qui
vise à améliorer la mesure de l'altitude par GPS.
En information géographique, on citera la fin d'un projet européen sur l'intégration d'information à plusieurs
échelles et le lancement d'un nouveau projet sur un moteur de recherche géographique sur l'Internet.
En géodésie, on retiendra une contribution de la géodésie spatiale à la connaissance des mouvements de la
plaque européenne.
Bulletin d’Information de l’IGN n° 74 (2003/3) 1
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
1
/
144
100%