PDF - 176.8 ko

LTH 1/6
Partie A : Etude de l’onduleur
1. L’interrupteur commandé H est un transistor.
2.
2.1. Valeur moyenne de u
La tension u est alternative (symétrique), sa valeur moyenne U
moy
est égale à zéro,
U
moy
= 0.
L’onduleur permet de réaliser la conversion continu-alternatif.
2.2.
2.2.1. Calcul de la valeur efficace du courant i
Le courant i est sinusoïdal, sa valeur efficace est donnée par la relation : I = I
max
2
soit I = 62 d’où I = 4 A.
2.2.2. Pour mesurer la valeur efficace du courant i il faut un ampèremètre ordinaire en
position AC.
2.3.
2.3.1. Relation entre u et E dans l’intervalle [0 ; T
2]
Lorsque K
1
et K
3
sont fermés, la loi des mailles permet d’écrire : u – E = 0 soit u = E.
2.3.2. Sens du courant i dans la charge
Dans l’intervalle [o ; t
1
] i < 0, il va de B vers A : les diodes D
1
et D
3
sont alors passantes.
Dans l’intervalle [t
1
; T
2] i > 0, il va de A vers B : les interrupteurs H
1
et H
3
sont passants.
2.4. Intervalles de conduction
Voir document réponse 1 page 5.
3.
3.1. Relation entre i
G
et i sur l’intervalle [0 ; T
2] :i
G
= i
3.2. Relation entre i
G
et i sur l’intervalle [T
2 ; T] : i
G
= - i.
3.3. Représentation de i
G
(t)
Voir document réponse 1 page 5.
4.
4.1. La fermeture simultanée des interrupteurs K
1
et K
4
(K
2
et K
3
) est interdite car elle
provoquerait le court-circuit du générateur.
4.2. La fermeture simultanée des interrupteurs K
1
et K
2
(K
3
et K
4
) est possible car elle ne
provoquerait pas le court-circuit du générateur.
Parie B : Etude du moteur asynchrone
1. Chaque enroulement du moteur sera soumis à une tension de valeur efficace égale à 230 V.
2. En couplage étoile les enroulements sont traversés par le courant en ligne, soit 4 A.
3.
3.1. On appelle pertes collectives, la somme des pertes fer et des pertes mécaniques.
3.2. C’est l’essai à vide qui permet de déterminer les pertes collectives.
4.
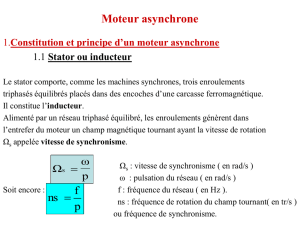
4.1. Détermination de la fréquence de synchronisme
La vitesse de synchronisme du moteur est celle qui est immédiatement supérieure à la
vitesse de rotation du moteur (960 tr/min). Soit donc n
s
= 1000 tr/min (ou 16,7 tr/s).
Détermination du nombre de paires de pôles
n
s
= f
p
p = f
n
s
p = 50
16,7 soit p = 3 paires de pôles.
4.2. Détermination du glissement du moteur
g = n
s
- n
n
s
g = 1000 – 960
1000 soit g = 0,04 ou 4 %.
CORRIGE DU BAC GET 2007

LTH 2/6
4.3. Détermination de la puissance absorbée par le moteur
P
a
= U.I. 3.cos ϕ
P
a
= 400 x 4 x 3
x
0,8 soit P
a
= 2217 W.
4.4. Détermination des pertes par effet Joule au stator
p
JS
= 3r.I
2
p
JS
= 3 x 1 x 4
2
soit p
JS
= 48 W.
4.5. Détermination des pertes mécaniques
p
m
= p
C
2
p
m
= 180
2 soit p
m
= 90 W.
4.6. Détermination de la puissance transmise au rotor
P
tr
= P
a
- p
JS
– p
fer
P
tr
= 2217 – 48 – 90 soit P
tr
= 2079 W.
4.7. Détermination des pertes Joule au rotor
p
JR
= g.P
tr
p
JR
= 0,04 x 2079 soit p
JR
= 83 W.
4.8. Détermination de la puissance utile
P
u
= P
a
- Σpertes
P
u
= P
a
– p
JS
– p
JR
– p
c
P
u
= 2217 – 48 – 83 – 180 soit P
u
= 1906 W.
4.9. Détermination du rendement du moteur
η = P
u
P
a
η = 1906
2217 soit η = 0,86 ou 86 %.
4.10. Détermination du moment du couple utile
P
u
= T
u
.Ω avec Ω = 2πn
60 = 2 x 3,14 x 1000
60 = 104,7 rad/s
T
u
= P
u
Ω
T
u
= 1906
104,7 soit T
u
= 18,2 N.m.
Partie C : Réglage de la vitesse du moteur asynchrone
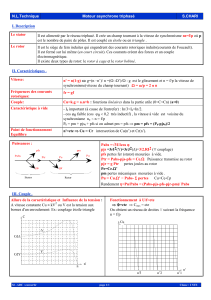
1. Calcul de k
T
u
= k.(n
s
– n)
k = T
u
n
s
– n
k = 18,2
1000 – 960 soit k = 0,46.
2.
2.1. Représentation de T
r
(n)
Voir document réponse 2 page 6.
2.2. Relation entre T
r
et T
u
en régime nominal
T
r
= T
u
2.3. Vérification de la valeur de la différence (n
s
– n)
T
u
= k.(n
s
– n) soit n
s
– n = T
u
k
T
r
= T
u
Si T
r
est constant alors T
u
est constant. On sait que k est constant donc T
u
k est
constant également et on en déduit que
n
s
– n est constant.
Vérification de la la valeur de n
s
– n
n
s
– n = 1000 – 960 = 40 tr /min.
2.4.
2.4.1. Calcul de n
s1
n
s
– n = 40
n
s1
= 40 + n
1
n
s1
= 40 + 580 soit n
s1
= 620 tr/min ou 10,3 tr/s.
2.4.2. Déduction de la valeur de f
1
n
s
= f
p

LTH 3/6
f = p.n
s
f
1
= 3 x 10,3 soit f
1
= 31 Hz.
Déduction de la valeur de U
1
U
f
est constant donc U
0
f
0
= U
1
f
1
U
1
= U
0
f
0
.f1
U
1
= 400
50 x 31 soit U
1
= 248 V.
2.4.3. Représentation de T
u1
(n)
Cette caractéristique est une droite passant par les deux points A
1
(n
s
= 620 tr/min ; 0
N.m) et B
1
(n
1
= 580 tr/min ; 19 N.m).
Les deux droites sont parallèles.
2.5. Représentation de la caractéristique T
u2
(n)
Pour f
2
= 20 Hz, n
s
= 400 r/min.
La caractéristique T
u2
(n) est une droite parallèle à T
u
(n) et passant par le point A
2
(n
s
=
400 tr/min ; 0 N.m).
La vitesse de rotation du moteur n
2
est donnée par l’abscisse du point de fonctionnement
B
2
, soit : n
2
= 360 tr/min.
3.
3.1. D’après la courbe v(f), la vitesse n’est pas proportionnelle à la fréquence car la droite ne
passe pas par l’origine du repère.
La fréquence minimale de démarrage ou fréquence de décollage est f
d
= 2.5 Hz. Voir
page 6.
3.2. D’après la droite v(f), lorsque v = 12 km/h on a f = 31 Hz. Voir page 6.
Parie D : Régulation de la vitesse du moteur entraînant le tapis
1.
1.1. Le convertisseur qui permet d’obtenir à partir d’une tension sinusoïdale, une tension
sinusoïdale de même fréquence et de valeur efficace différente est appelé
transformateur.
1.2. Le convertisseur qui permet d’obtenir à partir d’une tension sinusoïdale, une tension
unidirectionnelle est un redresseur.
Pour atténuer les ondulations de la tension redressée on branche un condensateur en
dérivation avec la charge.
2.
2.1. L’amplificateur opérationnel fonctionne en régime linéaire car il est en contre réaction
(pas de liaison sortie-entrée non onverseuse).
2.2. Expression de V
+
en fonction de R
1
, R
2
et u
a
La règle du diviseur de tension peut être appliquée à la portion de circuit constituée de R
1
et R
2
:
V
+
= R
2
R
1
+ R
2
.u
a
2.3. Montrons que V
-
= R
2
.u
r
+ R
1
.u
s
R
1
+ R
2
Loi des mailles à l’entrée inverseuse : V
-
+ R
1
i
1
– u
r
= 0 soit i
1
= u
r
– V
-
R
1
Loi des mailles à la sortie : V
-
- R
2
i
1
– u
s
= 0 soit i
1
= V
-
- u
s
R
2
i
1
= u
r
– V
-
R
1
= V
-
- u
s
R
2
R
2
.(u
r
– V
-
) = R
1
.(V
-
– u
s
)
R
2
.u
r
– R
2
V
-
= R
1
.V
-
– R
1
u
s
R
2
.u
r
+ R
1
u
s
= V
-
.(R
1
+ R
2
)
V
-
= R
2
.u
r
+ R
1
u
s
R
1
+ R
2
2.4. Loi des mailles aux entrées inverseuse et non inverseuse : u
d
– V
+
+ V
-
= 0
soit u
d
= V
+
- V
-
u
d
= 0 car l’amplificateur opérationnel fonctionne en régime linéaire.
2.5. Expression de u
s
en fonction de R
1
, R
2
, u
a
et u
r
V
+
= R
2
R
1
+ R
2
.u
a
et V
-
= R
2
.u
r
+ R
1
u
s
R
1
+ R
2

LTH 4/6
En régime linéaire V
+
= V
-
car u
d
= 0
R
2
.u
r
+ R
1
u
s
R
1
+ R
2
= R
2
R
1
+ R
2
.u
a
R
2
.u
r
+ R
1
u
s
= R
2
.u
a
R
1
u
s
= R
2
.u
a
- R
2
.u
r
R
1
u
s
= R
2
.u
a
- R
2
.u
r
R
1
u
s
= R
2
.(u
a
- u
r
)
u
s
= R
2
R
1
.(u
a
- u
r
)
Cette expression permet d’affirmer qu’à la sortie du montage on bien la différence u
a
- u
r
amplifiée et le coefficient d’amplification est R
2
R
1
.
2.6. Calcul du coefficient d’amplification
R
2
R
1
= 10R
1
R
1
= 10
3. Calcul de u
r
D’après les données, on a : u
r
= 0,01.n avec n = 580 tr/min
D’où u
r
= 0,01 x 580 soit u
r
= 5,80 V.
Calcul de f
f = 3.u
s
avec u
s
= 10.(u
a
- u
r
) = 10 x (6,83 – 5,80) = 10,3 V.
f = 3 x 10,3 soit f = 30,9 Hz.
4. Evolution de u
r
, u
s
, f et n
s
lorsque n augmente
D’après la relation u
r
= 0,01.n, lorsque n augmente, u
r
augmente.
D’après la relation u
s
= 10.(6,83
- u
r
), lorsque n augmente, u
r
augmente et u
s
diminue.
D’après la relation f = 3.u
s
, lorsque u
s
diminue, f diminue.
D’après la relation n
s
= f
p = f
3, lorsque f diminue, n
s
diminue.
D’après la relation n
s
– n = 40, lorsque n
s
diminue, n diminue.
Oui on a obtenu le résultat escompté.

LTH
5/6
D
1
D
3
H
1
H
3
D
2
D
4
H
2
H
4
 6
6
1
/
6
100%