Moteur asynchrone

Moteur asynchrone
1.Constitution et principe d’un moteur asynchrone
1.1 Stator ou inducteur
Le stator comporte, comme les machines synchrones, trois enroulements
triphasés équilibrés placés dans des encoches d’une carcasse ferromagnétique.
Il constitue l’inducteur.
Alimenté par un réseau triphasé équilibré, les enroulements génèrent dans
l’entrefer du moteur un champ magnétique tournant ayant la vitesse de rotation
Ωsappelée vitesse de synchronisme.
Ωs: vitesse de synchronisme ( en rad/s )
ω: pulsation du réseau ( en rad/s )
Soit encore : f : fréquence du réseau ( en Hz ).
ns : fréquence de rotation du champ tournant( en tr/s )
ou fréquence de synchronisme.
p
ω
Ωs
p
f
ns

1.2 Rotor ou induit
Deux types de rotors : • rotor en cage d’écureuil où des bornes métalliques parallèles
sont reliées par deux couronnes de faible résistance.
• rotor bobiné où les conducteurs sont logés dans des encoches
formant des enroulements triphasés ayant le même nombre de paires de pôles que le
stator.
1.3 symboles
M.A. à cage d’écureuil M.A. à rotor bobiné
M
3M
3

1.4 Principe de fonctionnement
Les trois enroulements du stator créent un champ magnétique tournant . Les
conducteurs de rotor, mis en court-circuit, sont le siège de courant induit.
Le rotor, traversé par les seuls courants de Foucault, tourne à la fréquence n < ns.
On dit que la rotation est asynchrone. Le rotor glisse par rapport au champ tournant.
1.5 Glissement
On définit le glissement par la relation :
En régime nominal, g est faible. ( qq % ) Exercice 1
sΩ
Ω - sΩ
ns n - ns
g

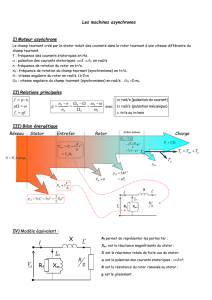
2. Bilan des puissances
2.1 Puissance reçue ou absorbée ( consommée )
P = UI cosφcos φ: facteur de puissance du moteur.
P ( en W ) ; U ( en V ) ; I ( en A ).
A vide, cos φest faible et Pv = Pfs + Pméc + Pjs Pjs à vide peuvent être négligées
2.2 Pertes au stator
Pour un moteur en charge :
Pjs et Pfs : ce sont les pertes par effet Joule et les pertes fer ( magnétiques ) au stator.
Les pertes fer dépendent de la valeur efficace de la tension aux bornes des enroulements
et de la fréquence du réseau.
r : résistance d’un enroulement entre le neutre et la
En étoile : Pjs = 3rI2= RI2phase;
R : résistance entre deux bornes de phase du stator.
En triangle : Pjs = 3rJ2= RI2J : courant par phase ; I : courant en ligne.
3
2
3
2
3

2.3 Puissance transmise au rotor
Puissance transmise au rotor : Ptr ( en W )
T : Couple électromagnétique ( en N.m )
Ωs : Vitesse de synchronisme ( rad/s )
2.4 Puissance transmise à l’arbre du rotor et pertes au rotor.
Pr : puissance transmise à l’arbre du rotor.
Pr = TΩLe rotor tourne à la vitesse Ω, vitesse du moteur asynchrone et développe le
couple électromagnétique T.
Les pertes électriques au niveau du rotor sont les pertes par effet Joule : Pjr.
Les pertes fer rotor Pfr sont négligeables.
Pjr = g Ptr
Ptr = P - Pfs - Pjs = T Ωs
 6
7
8
9
6
7
8
9
1
/
9
100%