Mouvements dans un champ newtonien sans utiliser les coniques

Mouvements dans un champ newtonien sans utiliser les coniques
I30. Chute d’un haltère.
Un haltère est formé de deux boules de masses et reliées par une tige rigide de masse négligeable qui impose
une distance A fixe entre les centres des deux boules. Cet haltère tombe verticalement dans le champ gravitationnel
d’un astre de centre O et de masse M : si à la distance r de O où se trouve l’haltère le champ gravitationnel est g
1
m2
m
G
, la
tige de l’haltère et sa vitesse sont parallèles à g
G
. Calculer la tension de la tige, en tenant compte de ce que . rA
II44. Les météorites.
Distance Terre-Soleil : rT = 1,5.1011 m ; TT = 1 an = 3,16.107 s ; masse de la Terre : MT = 6.1024 kg ; rayon de la
Terre : RT = 6,37.106 m ; constante de Cavendish : G = 6,67.10–11 N.m2.kg–2 ; vitesse de libération de la Terre
. 11km/s
LT
v=
Le référentiel de Copernic (C) est constitué du centre d'inertie du système solaire et des directions des étoiles. Le
référentiel héliocentrique (H) est constitué du centre du Soleil et des directions des étoiles ; il peut approximativement
être confondu avec le référentiel de Copernic et ces deux référentiels seront considérés comme galiléens avec une
excellente approximation. Le référentiel géocentrique (G) est constitué par le centre de la Terre et les directions des
étoiles. Le référentiel terrestre (T) est le référentiel lié au corps solide Terre. La Terre tournant autour de l'axe des pôles,
un point situé à la surface de la Terre sur l'équateur a une vitesse de 0,5 km/s par rapport à (G).
1) Le mouvement de (G) par rapport à (H) est-il un mouvement de translation ou de rotation ?
2) Discuter le caractère plus ou moins galiléen de (T) et de (G).
3) Dans un référentiel galiléen, un mobile P de masse m se meut dans le champ de gravitation d'un astre O de masse
M. On considère dans ce problème O comme fixe. A quelle condition le mouvement réel de O est-il au moins 1000 fois
moins ample que le mouvement de P ?
4) P décrit un cercle de centre O et de rayon r avec la période T. Démontrer la relation reliant r, T, G et M.
5) Calculer la masse MS du Soleil et le module de la vitesse vT dans (H) de la Terre sur son orbite, supposée
circulaire, autour du Soleil.
6) Montrer que la force subie par P dérive d'une énergie potentielle et exprimer cette énergie potentielle.
7) Quel est le type des trajectoires de P selon le signe de son énergie totale E ?
8) Les météorites sont des corps qui se meuvent dans le système solaire sous l'action du Soleil sans s'en échapper.
Montrer que le rapport de la vitesse vH dans (H) d'une météorite au moment où elle passe près de la Terre, à une
distance grande devant le rayon de la Terre et de la vitesse vT de la Terre dans (H) peut varier entre l’intervalle
(0 ;1,414). A quels types de trajectoire correspondent les extrémités de cet intervalle ?
9) Quelle est la relation entre les vitesses de la météorite H
v
G
dans (H) et G
v
G
dans (G) ?
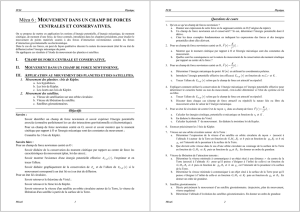
10) On porte à partir d'un point O les vecteurs H
v
G
et G
v
G
. Montrer que les extrémités de ces deux vecteurs sont dans
deux boules dont on précisera les centres et les rayons.
11) A une distance de la Terre grande devant le rayon terrestre et petite devant la distance Terre-Soleil, un mobile a
la vitesse v∞ par rapport à (G). Il vient percuter la surface terrestre. Avec quelle vitesse v dans (G) ?
12) Dans quel intervalle se trouve le module de la vitesse par rapport à (G) d’une météorite au moment où elle
percute la Terre en négligeant le freinage de l'atmosphère ?
13) Les étoiles filantes sont des météorites qui se vaporisent dans la basse atmosphère terrestre par suite de
l'échauffement dû à leur freinage par l'air. Dans quel intervalle numérique peut varier leur vitesse pour un observateur
terrestre ?
III14. Point de Lagrange L1 (mines de Douai 1975).
On se propose de déterminer le point où "l'attraction de la Lune équilibre celle de la Terre". La Terre et la Lune sont
assimilées à des points matériels T et L de masses M = 5,98.1024 kg et M' = 7,34.1022 kg et de distance fixe D = 3,84.108
m. La constante de la gravitation est G = 6,67.10–11 m3.kg–1.s–2.
1/ L'on admet qu'il existe un référentiel galiléen dans lequel la Terre et la Lune sont immobiles. Montrer qu'il n'existe
qu'une seule position dans l'espace où un point matériel P serait en équilibre. Si , exprimer α en fonction
de µ = M’/M, puis calculer numériquement α.
/PL TLα=
2/ L'on considère désormais qu'il existe un repère galiléen auquel est attaché un point O tel que T et L décrivent des
cercles coplanaires de centre O et de rayons a et a', les points T, O et L restant alignés à chaque instant dans cet ordre.
a) Exprimer la vitesse angulaire, a et a' en fonction de D, µ, M et G.
b) Un point matériel P de masse m situé sur le segment TL est en équilibre relatif par rapport à ces astres : sa
trajectoire est un cercle de centre O. A quelle condition simple (suffisante, mais non nécessaire) est-on assuré qu’il ne
perturbe que peu les mouvements de T et L ?
c) En appliquant à P la loi fondamentale de la dynamique, écrire la condition d'équilibre relatif pour P sous forme
d’une relation entre ,, ,, , ,G M M D OP PT PL
′.
Mouvements dans un champ newtonien sans utiliser les coniques, page 1

d) Mettre cette relation sous la forme 2
2
1(1 )
(1 )
1
−−α
−α
µ= −α
α
.
e) Montrer que si α est un infiniment petit, µ est un infiniment petit équivalent à kαp (k et p constantes à déterminer).
f) Calculer numériquement α.
g) Vérifier la relation de d) sur une valeur particulière du couple µ, α, ou bien montrer que cette relation est
invariante dans une certaine transformation portant sur µ et α.
IV40. Troisième vitesse cosmique.
Constante de la gravitation ; masse du Soleil ; masse de la Terre
; rayon de la Terre ; distance Terre-Soleil .
11
6,67.10 SIG−
=30
2.10 kg
S
M=
24
6.10 kg
T
M=6
6, 4.10 m
T
R=11
1, 5 . 1 0 mD=
Le référentiel héliocentrique est défini par le centre du Soleil et les directions d’étoiles « fixes ». Il est galiléen avec
une bonne approximation.
Le référentiel géocentrique est défini comme lié au centre de la Terre et en translation par rapport au référentiel
héliocentrique. Il est approximativement galiléen si on y traite le mouvement d’un mobile proche de la Terre, à
condition de ne considérer que le champ gravitationnel créé par la Terre et de ne pas tenir compte de celui créé par le
Soleil.
1) Dans un référentiel galiléen, un mobile P de masse m n’est soumis qu’à la force F
G
gravitationnelle créée par un
astre sphérique fixe de centre O et de masse M. On note r et
OP=/
r
uOPOP=
J
JJG
G
. Quelle est l’énergie potentielle
associée à cette force ? Une démonstration valable que le mouvement soit rectiligne ou non sera préférée.
2) Quelle est la condition nécessaire portant sur r et sur la vitesse v du projectile pour qu’il s’écarte indéfiniment de
O ? On admettra que cette condition est suffisante.
3) Calculer, littéralement et numériquement, la vitesse de la Terre dans le référentiel héliocentrique.
T
v
4) On se place dans le référentiel géocentrique. On lance de la surface de la Terre un projectile à la vitesse 0
v
G
. A
quelle condition ce projectile s’écarte-t-il indéfiniment de la Terre ?
5) Cette condition étant remplie, quelle est la relation entre et la vitesse du projectile en un point P
0
v1
v1 situé à une
distance de la Terre grande par rapport à et petite par rapport à D ?
T
R
6) On se place dans le référentiel héliocentrique. Quelle est la vitesse 1
v′
G
du projectile en P1 ?
7) A quelle condition sur le projectile s’écarte-t-il indéfiniment du Soleil ?
1
v′
8) On désire lancer le plus économiquement possible un projectile de la surface de la Terre de sorte qu’il s’évade du
système solaire. Pour l’instant, on ne tient pas compte de la rotation de la Terre autour de l’axe des Pôles. Dans quelle
direction faut-il choisir 1
v
G
? Exprimer et calculer numériquement sa norme.
9) Calculer, littéralement et numériquement, la vitesse minimale de lancement de la Terre pour que le projectile
quitte le système solaire, cette vitesse étant calculée dans le référentiel géocentrique.
0
v
10) En réalité, le tir a lieu dans le référentiel terrestre. Comment tirer parti au mieux de la rotation de la Terre autour
de l’axe des Pôles ?
V37. Tir vers le Soleil.
Dans un référentiel galiléen, se trouvent deux points matériels, O de masse M et P de masse m négligeable devant M.
Le point O est immobile ; P se meut sur une droite passant par O ; on note x son abscisse, supposée positive, par rapport
à O.
1) Pour x > 0, exprimer la mesure algébrique de la force F subie par P en fonction de M, m, x et de la constante de
Cavendish G = 6,67.10–11 SI.
2) A l'instant t = 0, on abandonne avec une vitesse nulle le point P à l'abscisse a. Exprimer sa vitesse à un instant
quelconque t en fonction de x.
3) Exprimer t en fonction de x. On donne :
()
3/2
si 0 : ( ) 1 arccos
1/ 1/
dx x x x
xafx a aa a
xa
⎡
⎤
≤≤ ==−−+
⎢
⎥
⎢
⎥
−
⎣
⎦
∫.
4) De la Terre, on lance une sonde vers le Soleil. Expliquer pourquoi il est préférable que, une fois la sonde un peu
écartée de la Terre, la vitesse de la sonde dans le référentiel géocentrique soit l'opposé de la vitesse de la Terre dans le
référentiel héliocentrique. Quelle doit être la vitesse de lancement depuis la surface terrestre ?
5) La Terre décrit un tour autour du Soleil en TT = 1 an = 365,25 jours sur une orbite de rayon rT. Exprimer la masse
du Soleil M en fonction de G, rT et TT.
6) La sonde décrit une trajectoire rectiligne si l'on néglige l'attraction qu'exerce sur elle la Terre. Que pensez-vous de
cette approximation ? Négligeons aussi le rayon du Soleil devant le rayon de l'orbite terrestre. Montrer que la durée t1 de
son voyage est égale à 32
T
T. Calculer t1 en jours.
Mouvements dans un champ newtonien sans utiliser les coniques, page 2

VI36. Satellites de télécommunication (d’après mines-ponts 2007 MP).
On se propose d'étudier quelques aspects du fonctionnement de satellites de télécommunication en orbite autour de la
Terre. Sauf mention contraire, on considérera que la Terre est un corps de symétrie sphérique, de masse , de rayon
et de centre O, immobile dans l'espace, sans rotation propre. La constante de gravitation est G = 6,67
10
T
M
6400 km
T
R=
–11 m3.kg–1.s-–2 .
1– Un satellite de masse est en orbite circulaire de centre O, de rayon , à une altitude de l'ordre de
quelques centaines de kilomètres (orbite basse). Exprimer sa période de révolution , sa vitesse v et sa vitesse
angulaire Ω en fonction de et des constantes du problème.
S
M0
rh
orb
T
0
r
2 – Soient et l’énergie cinétique du satellite et son énergie potentielle dans le champ de gravitation de la
Terre ( à l’infini) ; établir le « théorème du viriel » : .
c
Ep
E
0
p
E=02 =+ pc EE
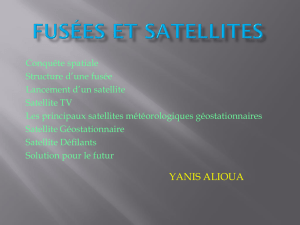
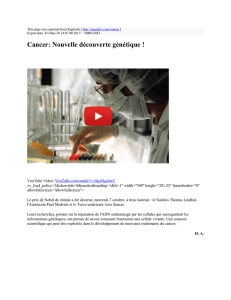
3 – A chaque position P du satellite correspond un point Q sur la Terre à
la verticale de ce point. L'ensemble des points Q définit la trace de la
trajectoire. Pour un observateur situé en Q, la durée de visibilité
τ
d'un
satellite est l'intervalle de temps entre son apparition sur l'horizon (point A de
la Fig. 1) et sa disparition sous l'horizon (point B). Calculer pour
. On donne
/
orb
Tτ
m108 5
×=h
(
)
arccos 8 / 9 27, 27 0, 476 rad=°=
Mouvements dans un champ newtonien sans utiliser les coniques, page 3
4 – Pour les besoins de la téléphonie mobile, on place sur des orbites
polaires (c'est-à-dire contenues dans un plan méridien terrestre, plan contenant
l’axe des Pôles) un ensemble de satellites, identiques, appelé « train de
satellites ». Ces satellites sont disposés régulièrement sur leur orbite polaire
commune, à l'altitude de 800 km. Calculer le nombre minimal de satellites
nécessaires pour former un « train » afin que tous les points au sol, dans le
même plan méridien que l'orbite, voient au moins un satellite à tout instant.
Lors du concours, mais pas lors du DS, il avait été posé la question, trop
difficile : Combien d'orbites polaires de ce type faut-il pour couvrir la surface
de la Terre, c'est à dire pour que chaque point de la surface terrestre voie au
moins un satellite à tout instant ? Combien doit-on disposer de satellites en tout ?
Fig. 1 : Satellite P, point Q et
ligne des horizons AB. Le plan orbital
représenté est dit polaire (la ligne
des pôles est N'SNS').
5 – Quels sont les avantages et les inconvénients d'un satellite géostationnaire, c’est-à-dire fixe en référentiel
terrestre, comparé au train de la question 4 ?
6 – La Terre est entourée d'une atmosphère qui s'oppose au mouvement du satellite. La force de frottement a
f
G
créée par l'atmosphère est proportionnelle au carré de la vitesse du satellite et elle s'exprime par vvvfa
G
G
α−= , où
a une valeur positive, constante dans cette question. Déterminer la dimension de α
α
. Écrire le théorème de
l'énergie cinétique en supposant que le théorème du viriel établi à la question 2 reste applicable en présence de a
f
K
.
Établir l'équation différentielle vérifiée par . h
7 – Un satellite de masse placé sur une orbite d'altitude 800 km subit une diminution d'altitude
d'environ 1 m par révolution ; sa vitesse est, en norme, très peu affectée au bout d'une révolution. En déduire une
estimation au premier ordre de (ne pas s'étonner de la petitesse extrême du résultat !).
2000 kg
S
M=
α
8 – En réalité, les frottements dépendent de la densité de l'atmosphère et donc de l'altitude. Dans un certain
domaine d'altitudes, varie selon la loi , où
α
()
β
γ=α hh /
γ
et
β
sont positifs. Le même satellite que celui de la
question 7 (perdant 1 mètre par révolution pour km800
≈
h) perd, à l'altitude de 400 km, 2 mètres par révolution.
Calculer et . γ β
Cette loi de dépendance avec l’altitude vous paraît-elle logique ?
Réponses
I.
()
12
2
1/ 1/
g
Trm m
=+
A.
II. 1) translation ; 3) ; 4) /1000mM<
3
22
4
rGM
T=π ; 5) 23
30
2
42.10 kg
T
S
T
r
MGT
π
== ; 229, 8 km/s
T
T
T
r
vT
π
== ;
6) ; 7) si , c’est une ellipse, si , c’est une parabole, si , c’est une branche
d’hyperbole ; 8) : segment Terre-Soleil ;
/
p
EGMm=−r0E<0E=0E>
0v→2T
v→vT
: parabole ; 9) HG
vvv=+
G
GG
; 10) H
v
G
est dans la boule
de centre 0
G
et de rayon 2T
v ; G
v
G
est dans la boule de centre T
v−
G
et de rayon 2T
v ; 11) où
est la vitesse de libération de la Terre ; 12) entre 11 et ; 13) .
22
0LT
vv v
∞
=+
2
/s
LT
v
km/s 73 km/s 073kmv<<

III. 1) 10, 1
11/
α==
+µ ; 2.a) 11
D
D
aa
µ
′==
+µ +µ ;
()
3
1GM
D
+µ
ω= ; 2.b) 2.c) mM
′
2
2
GMm GM m
mOP PT PL
′
−ω =−+2
; 2.e) ; 2.f) ; 2.g) si , ;
.
3
3µ≈α 0,160α=1µ= 1/2α=
1/ , 1µ→µα→ −α
IV. 1) p
GMm
Er
=− ; 2) 2
10
2
GMm
mv r
−≥
; 3) 1
29800 m.s
S
T
GM
vD
−
== ; 4) 2
0
10
2
T
T
GM m
mv R
−≥
; 5)
22
10
2T
T
GM
vv R
=− ; 6) 11T
vvv
′=+
G
GG
; 7) 12T
vv
′≥= ; 8) 1
v
G
et T
v
G
parallèles et de même sens ;
()
1
12 1 12300 m.s
T
vv −
=−= ; 9) 2
01
216600 m .s
T
T
GM
vvR
−
=+ = 1
; 10) tirer horizontalement dans le sens
ouest-est à partir d’un point de l’Equateur.
V. 1) 2
GMm
Fx
=− ; 2)
()
11
2vGM
xa
=−−
; 3) ()
2
f
x
tGM
=−
; 4) vitesse de lancement : racine de la somme
des carrés de la vitesse de la Terre sur son orbite autour du Soleil (30 km/s) et de la vitesse de libération de la Terre (11
km/s), soit 32 km/s ; 5) 23
2
4T
T
r
MGT
=π ; 6) 165 jours
32
T
T
t== .
VI. 1) 3
0
T
GM
r
Ω= ; 3
0
2
orb
T
r
TGM
=π ;
0
T
GM
vr
= ; 3) 6, 6
orb
T=
τ ; 4) 7 ; 40 satellites ; 6)
[]
;
1
ML−
α=
cpa
dE dE f dr=−+⋅
G
G
;
()
2TT
S
dh GM R h
dt M
α+
=− ; 7) 12 1
0
3.10 kg.m
2
S
Torb
Mh
GM r T
−−
∆
α== ; 8) ;
;
1β=
6
2, 5.10 kg
−
γ=
Mouvements dans un champ newtonien sans utiliser les coniques, page 4

Corrigé
Mouvements dans un champ newtonien sans utiliser les coniques, page 5
I.
()()
11 11 22 22 1 2
22
12 2121
12
12 22
12 12
12 12 12
11 11 11
ma mg T ma mg T a a
GM GM
TTgg GMrrr
rr
ggT
mm rr
mm mm mm
=−=+ =
−
−−+
−=+ = = = ⎛⎞
⎟
⎜
++ +⎟
⎜⎟
⎜
⎝⎠
r
Or 1221 3
12 12
22
11 11
GM g
rrrr T
rr
mm mm
−== =
⎛⎞⎛⎞
⎟⎟
⎜⎜
++
⎟⎟
⎜⎜
⎟⎟
⎜⎜
⎝⎠⎝⎠
AA
A .
II. 1) (G) est en translation par rapport à (H) ; en effet, ces référentiels ont leurs axes parallèles.
2) A condition de ne pas considérer les champs gravitationnels des astres autres que la Terre, (G) est
approximativement galiléen au voisinage de la Terre.
(T) est aussi approximativement galiléen dans les mêmes conditions ; toutefois, il l’est moins que (G) ; en particulier,
la force de Coriolis −ω2mv∧
G
G
, qui existe dans (T) et non dans (G), est importante si la vitesse est grande, cas des
satellites, dont le mouvement se détermine plus facilement dans (G).
3) Il faut ; en effet, les mouvements sont homothétiques dans le rapport m dans le référentiel du
centre de masse.
/1000mM</M
4)
()
3
2
22
2
4
GMm r GM
2
a m r
T
rT
π
== =
π
Fm
G
G.
5)
()
()
()
3
211 11
23 30
22 7
11 7
41,5.10 21,5.10
42
2.10 kg 29, 8 km/s
3, 16.10
6,67.10 3,16.10
T T
S T
T
T
rr
Mv
T
GT −
π×π×
ππ
== = == =
×
6) L’énergie potentielle est la fonction de la position, si cette fonction existe, dont la variation est égale à
l’opposé du travail de la force :
p
E
22
prp
GMm GMm GMm
dE F dr u dr dr E r
rr
=−⋅ =⋅==−
G
J
JGJJG
G
. Ce qui montre que
l’énergie potentielle existe.
7) La trajectoire est une conique de foyer O. Son genre dépend de 2
1
2
GMm
Emv r
=−. Si , c’est une
ellipse, si E, c’est une parabole, si E, c’est une branche d’hyperbole.
0E<
0= > 0
8) Pour que la météorite reste dans le système solaire, il faut et il suffit que dans (H) 2
1
20
GMm
Em . Or vr
=−<
2
T
T
GM v
r=. Donc la condition équivaut à 02.
T
vv<<
→
Si v, la trajectoire tend vers le segment Terre-Soleil ; si 0 2 T
vv, la
trajectoire tend vers une parabole. →
9)
vitesse absolue vitesse relative vitesse d'entrainement
HGT
vvv=+
G
GG
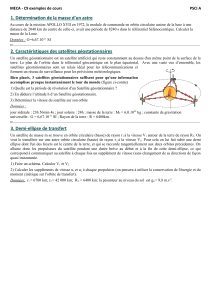
10) vH
G
est dans la boule de centre 0
G
et de rayon 2T
v ; vG
G
est dans la boule de
centre −T
v
G
et de rayon 2T
v.
11) Exprimons que l’énergie dans (G) 2
1
2
T
GM m
mv r
− se conserve :
22
11
0
22
T
T
GM m
mv mv
R∞
−= ou où est la vitesse de
libération de la Terre.
22 2
0LT
vv v
∞
=+ 11km/s
LT
v=
12) D’après ce qui précède, la vitesse d’une météorite varie entre 11 et km/s
()
[
]
2
2
11 2 1 29, 8 73 km/s++× =
13) En raison du freinage par l’air, la vitesse peut être inférieure, donc . En outre, il faut tenir
compte du mouvement de la Terre par rapport à (G), soit quelques centaines de m/s, ce qui en gros ne change rien.
073kmv<< /s
sphère à l’intérieur de
laquelle doit se trouver
l’extrémité du vecteur
vitesse de la météorite
0
G
T
v−
G
G
v
G
2T
v
2
1
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%