Satellites de télécommunication

Satellites de télécommunication
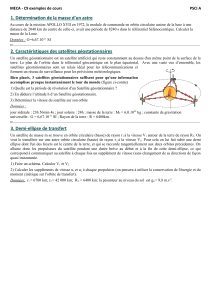
PARTIE 1 : Satellites sur orbite circulaire
Q1 :
Dans le référentiel géocentrique considéré comme galiléen on ne prend en compte que la
force de gravitation exercée par la Terre
Le candidat peut parler de force centrale :
2
)( r
k
rf
et on sait alors que l’énergie
potentielle s’écrit :
2
)( r
k
rEP
. Dans le cas de l’interaction newtonienne, en prenant en
compte la définition de l’altitude h, il vient
2
)( hR
MGM
rf
T
ST
et
hR MGM
rE T
ST
P
)(
ce qui permet d’obtenir période et vitesse.
C’est une orbite circulaire, dans le référentiel géocentrique m = ( r ) = - m v²/r
r
e
v = r
2
2
2
hR
MGM
hR vM
hRM
T
TS
T
S
TS
.
T
T
GMhR
T3
2
et
hR
GM
vT
T
T = 6068 s v = 7455 m.s-1
Q2 : L’énergie cinétique s’écrit :
hR MGM
ET
ST
c
2
1
. Etant donné la formulation de l’énergie
potentielle dans le cas de l’interaction newtonienne :
hR MGM
rE T
ST
P
)(
, le théorème du
viriel est alors évident :
02 PC EE
.

Q3 : En se plaçant au centre de la Terre, l’angle ancillaire est tel que
hRR
T
T
cos
. La
durée de visibilité s’en déduit aisément :
T
T
T
TGMhR
hRR
T3
arccos2
2
2
.
AN : 919 s soit = 9.2.102 s
Q4 :
hRR
T
T
T
arccos
. Cette valeur ne dépend que de RT et h. AN :
60,6
T
.
Pour que tout point de l’orbite puisse « voir » un satellite, il faut donc 7 satellites pour garantir
la couverture. L’angle ancillaire est 2=0.476 radian.
On se place sur l’Equateur. Grossièrement, un train de 7 satellites va « couvrir » 0.476 radian
de l’Equateur. On réitère le calcul précédent mais sur la moitié de la Terre soit 4 secteurs
soit il faut 4trains de 7 satellites pour assurer la couverture de l’Equateur. Les orbites étant
polaires, couvrir l’Equateur assure la couverture de tout point du globe.
Ce chiffre de 28 satellites est discutable : il faut prendre en compte le fait qu’un train de 7
satellites correspond à des satellites montant et descendant et que la Terre tourne
Q5 : la notion de satellite géostationnaire est qu’il survole toujours le même point de la Terre
(du moins s’il est en orbite sur le plan équatorial terrestre…). Donc T=D (D durée d’une
révolution terrestre).
La Terre fait un tour sur elle même par rapport au référentiel géocentrique ou au référentiel
de Copernic en 23h56, ce qui donne T = 86160s et h=35819 km.
En prenant T=86400 (1 jour légal) , on trouve 35897 km.
La notion de « visibilité » est à prendre avec prudence : pour un point du globe, le satellite est
alors soit visible et la durée de visibilité est infinie, soit invisible. Il ne faut pas utiliser la
formule de la question 3 pour la durée de visibilité car on y faisait l’hypothèse d’une Terre
immobile (le schéma permettant le calcul de est incorrect dans ce cas ! !).
Pour une zone donnée de la Terre, il suffit de disposer d’un seul satellite au lieu d’une bonne
quarantaine. Mais il est beaucoup plus éloigné, ce qui pose des problèmes de perte de
transmission.

Il faut aussi remarquer que les Pôles et les régions qui les entourent ne voient pas les satellites
géostationnaires.
Q6 : a pour dimension m-1
On suppose que le théorème du viriel s’applique toujours. L’énergie totale s’écrit alors
pTS
m p c T
EGM M
1
E E E 2 2 R h
m
dE
dt
= .
m
dE
dt
= - MS v3 or ½ m v² = EC = -Ep/2
p3/2
P
s
d( E ) 2( E )
dt M
or
p
PT
d( E ) dh
E R h
On en déduit
T
T
dh 2 G.M
Rh
dt
Q7 : sur une période, en considérant que h varie peu
h = - 2 [G MT ( RT+h) ]1/2
T
or
T
T
GMhR
T3
2
h = − 4 (RT+h) ²
2
4hR
h
T
AN : =1,535 10-15 m-1
L’orbite initiale a une période de 6068 secondes En 10 ans il y a 86400x365x10 secondes. Il y
a donc 51971 orbites. Le satellite est « descendu » de presque 52 km ! ! l’altitude est alors de
740 km. La vitesse est passée de 7455 m/s à 7487 m/s.
Calcul plus précis :
(RT+ h’ )1/2 - (RT+h)1/2 = -
T
GM
t (RT+ h’ )1/2 - (RT+h)1/2 = − 9,65
h = -
51,7 km
RT+ h’ = 7148 km soit
h = − 52 km

h’ reste proche de h . Si on fait un développement limité en posant h’ = h +
h on
retrouve
h = − 4 (RT+h) ²
Il peut sembler surprenant qu’une force qui s’oppose au mouvement se concrétise par une
augmentation de vitesse : le freinage d’une voiture (force aérodynamique par exemple) réduit
sa vitesse. Mais c’est sans compter sur l’énergie potentielle : à une orbite plus basse
correspond une vitesse plus élevée.
Il en est de même sur un vélo qui descend sur une pente inclinée la vitesse augmente même
s’il est freinée !

Q8 :
1
2
1
1
14h
hR
h
T
et
2
2
2
2
24h
hR
h
T
1 = 1,535.10-15 m.s-1 2 = 3,442.10-15 m.s-1
2/ 1 ) = ( h1/h2) = 1,165 d’où ensuite = 1 h1 ; = 1,157.10-8 SI
Partie II : stabilisation par gradient de gravité
Q9 : Forces gravitationnelles
1
3
1
1r
rmGM
FT
et
2
3
2
2r
rmGM
FT
Q10 : Forces d’inertie d’entraînement
1
2
1rmfie
et
2
2
2rmfie
Avec
3
0
r
GMT
Forces de Coriolis :
cor1 1
f 2m v ;
et
cor2 2
f 2m v ;
On montre facilement que :
1
cor1
f 2m SM .
et
2
cor2
f 2m SM
Q11 : dans R’, les forces de Coriolis ont donc un moment nul puisqu’orientées selon
1
SM .
et
2
SM .
Le moment résultant ne fait donc intervenir que les forces d’inertie d’entraînement et les
forces gravitationnelles.
Le moment va s’écrire :
 6
7
8
6
7
8
1
/
8
100%