moment cinétique – forces centrales énergie potentielle effective

Q Moment cinétique – Forces centrales (33-203) Page 1 sur 8 JN Beury
O
O’
M
u∆
G
O
O’
M
u∆
G
MOMENT CINÉTIQUE – FORCES CENTRALES
ÉNERGIE POTENTIELLE EFFECTIVE
I. DÉFINITIONS
I.1 Quantité de mouvement
Soit v
Gla vitesse à l’instant t d’un point matériel M dans le référentiel
(
)
,,,
xyz
Ou u uℜ=
G
GG .
La quantité de mouvement de M est :
(
)
(
)
pM mvM
ℜ
ℜ
=
G
G. En abrégé, on a : pmv=
GG
.
Unités : kg.m.s-1
I.2 Moment cinétique en A
a) Définition
Soit A un point quelconque qui n’est pas nécessairement fixe.
Le moment cinétique en A du point M est : ^
A
A
Mmv
σ
=
J
JJJG
G
G.
Unités : kg.m2.s-1
b) Formule du changement de point
()
''^ ' ^
A
A
Mmv AAAM mv
σ
==+
JJJJJG JJJJG JJJJG
GG G
, d’où ''^
AA
A
Ap
σσ
=+
J
JJJG
G
GG
.
I.3 Moment cinétique par rapport à un axe orienté
a) Définition
Soit ∆ un axe orienté. L’orientation de l’axe est donnée par le vecteur unitaire u
∆
G
.
Soit O un point quelconque de l’axe.
Le moment cinétique de M par rapport à l’axe
∆
est : Ou
σ
σ
∆
∆
=
⋅
G
G.
On vérifie que cette définition est indépendante du point O sur l’axe :
(
)
''^ 0
OO O
uOOpuu
σσ σ
∆∆∆
⋅
=+ ⋅=⋅+
JJJJG
G
GG GGGG car
()
'^OO p u
∆
⊥
JJJJG GG
.
b) Cas particulier des coordonnées cylindriques avec un mouvement plan
r
OM ru=
JJJJGG et r
vru ru
θ
θ
=+
GG G
On a donc :
()
2
^^
Orr z
OM mv ru m r u r u mr u
θ
σ
θθ
== +=
JJJJG
GGGGGG
2
zmr
σ
θ
=. On a vu dans le chapitre précédent que 2
d1
d2
Ar
t
θ
=, d’où d
2d
z
A
mt
σ
=.
I.4 Moment en A d’une force
Soit A un point quelconque qui n’est pas nécessairement fixe.
Le moment en A de la force
f
G appliquée en M est : ^
A
A
MfΓ=
G
J
JJJG
G
.
Unités : N.m
Formule du changement de point :
(
)
''^ ' ^ '^
AA
A
Mf AAAM f AAfΓ= = + =Γ+
G
GG
JJJJJG JJJJG JJJJG JJJJG
GG
''^
AA
A
AfΓ=Γ+ G
JJJJG
GG
I.5 Moment d’une force par rapport à un axe orienté
a) Définition
Soit ∆ un axe orienté. L’orientation de l’axe est donnée par le vecteur unitaire u
∆
G
.
Soit O un point quelconque de l’axe.
Le moment de la force par rapport à un axe orienté
∆
est : Ou
∆
∆
Γ
=Γ ⋅
G
G

Q Moment cinétique – Forces centrales (33-203) Page 2 sur 8 JN Beury
M
A
H
α
α
f
G
u∆
G
On vérifie que cette définition est indépendante du point O sur l’axe :
(
)
''^ 0
OO O
uOOfuu
∆∆∆
Γ
⋅=Γ+ ⋅=Γ⋅+
G
JJJJG
G
GG
G
GG
car
()
'^OO f u
∆
⊥
G
JJJJG G.
b) Cas particulier d’une force perpendiculaire à l’axe ∆
^
A
A
MfΓ= G
JJJJG
G
La norme du moment de la force vaut : ^sin
AAM f AM f
α
Γ= =
G
G
J
JJJG
G
On définit H le projeté orthogonal de A sur la droite
(
)
,
M
f
G
.
On a alors : sin
A
H
A
M
α
=, d’où
A
A
HfΓ= G
G = force × longueur du bras de levier (distance AH).
Comment déterminer le signe + ou – pour
∆
Γ
?
On peut appliquer la règle de la main droite : les 4 doigts de la main sont dans la direction de
A
M
JJJJG, la paume
de la main est dans la direction de
f
G. Le pouce donne la direction de
A
Γ
G
. Si
A
Γ
G et u∆
G sont dans le même
sens, il faut mettre un signe +, sinon il faut mettre un signe –.
Sur le schéma
A
Hf
∆
Γ=+ G = force × longueur du bras de levier (distance AH).
II. THÉORÈMES DE LA QUANTITÉ DE MOUVEMENT ET DU MOMENT CINÉTIQUE
PAR RAPPORT À UN POINT MATÉRIEL
II.1 Théorème de la quantité de mouvement
C’est une simple variante du PFD.
Soit un point matériel soumis à une résultante de forces
f
G
.
Soit ℜ un référentiel galiléen. Théorème de la quantité de mouvement : d
d
pf
t
=
G
G
II.2 Théorème du moment cinétique
Soit un point matériel soumise à une résultante de forces
f
G
.
Soit O un point fixe dans un référentiel ℜ galiléen.
Théorème du moment cinétique : d
d
O
O
t
σ
=Γ
GG
Démonstration :
^
OOM mv
σ
=JJJJG
GG
dd^
dd
OOM mv
tt
σ
=
JJJJG
GGd
^d
v
OM m t
+
G
JJJJG. Le premier terme est nul et d
d
v
mf
t
=
G
G
. On a alors :
()
^O
OM f f=Γ
GG
J
JJJGG.
II.3 Théorème du moment cinétique par rapport à un axe orienté
Soit ∆ un axe orienté fixe dans ℜ. L’orientation de l’axe est donnée par le vecteur unitaire u∆
G.
()
d
d
O
Of
t
σ
=Γ
GG
G
On multiplie scalairement cette relation par u
∆
G, d’où
()
d
d
O
O
ufu
t
σ
∆
∆
⋅
=Γ ⋅
G
G
G
G
G.
On peut rentrer u∆
G dans la dérivée. On obtient :
(
)
()
d
d
O
O
ufu
t
σ
∆
∆
⋅
=
Γ⋅
G
G
G
G
G
.
Soit ∆ un axe orienté fixe dans un référentiel
ℜ
galiléen.
Théorème du moment cinétique en projection sur
∆
: d
dt
σ
∆
∆
=
Γ

Q Moment cinétique – Forces centrales (33-203) Page 3 sur 8 JN Beury
M
θ
Z
H
O
l
I
x
u
G
z
u
G
y
u
G
u
θ
G
T
G
P
G
r
u
G
II.4 Conservation de la quantité de mouvement et du moment cinétique
a) Définition d’un système isolé
Un point matériel est dit isolé ou libre s’il ne subit aucune interaction. Il est soumis à une force nulle.
On a : pcte=JJG
G et Octe
σ
=JJG
G
Pour un système isolé, on a conservation de la quantité de mouvement et du moment cinétique.
b) Définition d’un système pseudo-isolé
Un système est pseudo isolé s’il est soumis à des actions extérieures qui se compensent : 0
i
i
f=
∑GG.
On a conservation de la quantité de mouvement.
II.5 Application au pendule simple
On considère une masse m accrochée à un fil. Il y a trois méthodes pour obtenir l’équation différentielle du
mouvement :
Méthode n°1 : Principe fondamental de la dynamique.
Méthode n°2 : Raisonnement énergétique pour un système conservatif à une dimension. m
Ecte=. En écrivant
d0
d
m
E
t=, on obtient directement l’équation différentielle du mouvement.
Méthode n°3 : Théorème du moment cinétique.
a) Principe fondamental de la dynamique
• Système = {Point matériel M de masse m}
• Référentiel
()
,,,
xyz
Ou u uℜ=
G
GG terrestre galiléen
• Bilan des forces :
¾ r
TTu=−
GG tension du fil : d0WTl
δ
=
⋅=
J
JG
G
. La tension du fil ne
travaille pas. C’est une force conservative.
¾ P
G : poids.
• PFD : ma P T=+
GG
G. Il est préférable de projeter dans la base des
coordonnées cylindriques qui sont adaptées à la symétrie du problème :
mouvement à une dimension.
Sur le schéma, I représente la position de M pour 0
θ
=
. On a donc
OI OM l cte===.
On projette dans la base
()
,
r
uu
θ
GG :
mr
()
2cos
2
rTmg
mr
θ
θ
−=−+
()
sinrmg
θ
θθ
+=−
avec r = l = cte.
La tension du fil a une composante nulle suivant u
θ
G
. On obtient ainsi directement l’équation différentielle :
sinml mg
θ
θ
=−
, soit sin 0
g
l
θθ
+=
. On pose 2
0
g
l
ω
=
, soit 2
0sin 0
θω θ
+
=
.
b) Raisonnement énergétique
• Bilan des forces :
¾ r
TTu=−
GG tension du fil : d0WTl
δ
=
⋅=
J
JG
G
. La tension du fil ne travaille pas. C’est une force
conservative.
¾ P
G : poids. On a vu dans le cours que c’est une force conservative. p
EmgZ= avec Z orienté vers le
haut et d’origine le point I (cf schéma). On choisit le point I comme origine des énergies potentielles.
On a
()
(
)
1cos
p
EmglOHmgl
θ
=−= −
• Le système est conservatif puisque toutes les forces sont conservatives.
L’énergie mécanique se conserve au cours du temps :
()
2
11cos
2
m
E mv mgl
θ
=+−. Or vr=
Gr
uru lu
θ
θ
θ
θ
+=
GGG
Soit
()
()
2
11cos
2
m
E m l mgl
θ
θ
=+−
. Cette équation est appelée intégrale première du mouvement.
D’où 2
d0sin
d
m
Eml mgl
t
θ
θθθ
== +
.

Q Moment cinétique – Forces centrales (33-203) Page 4 sur 8 JN Beury
O
M
θ
r
x
y
z
r
u
G
u
θ
G
Si 0
θ
≠
, on obtient l’équation différentielle sin 0
g
l
θθ
+
=
.
c) Théorème du moment cinétique
• Bilan des forces :
¾ r
TTu=−
GG tension du fil :
(
)
^0
OTOMTΓ= =
J
JJJG
G
G
G
G.
¾ P
G : poids.
()
()
^^cos sin sin
Orr z
P OM P lu mg u mg u mgl u
θ
θ
θθ
Γ= = − =−
JJJJG
GG
G
G
GG G
Interprétation physique : on peut retrouver ce résultat directement avec la relation : force × longueur du
bras de levier. Le signe – est indispensable car si 0
θ
>, le poids a tendance à faire tourner M dans le sens
des aiguilles d’une montre. Avec la règle de la main droite, le pouce est suivant
()
z
u−G, d’où le signe –.
• Théorème du moment cinétique en un point O fixe :
(
)
2
^^
Or z
OM mv lu m r u mr u
θ
σ
θθ
== =
J
JJJG
G
GG G G
d
d
O
O
t
σ
=Γ
GG, d’où 2sin
z
z
mr u mgl u
θ
θ
=−
G
G
, d’où l’équation différentielle : sin 0
g
l
θθ
+
=
.
III. MOUVEMENT À FORCE CENTRALE
III.1 Définition
Soit ℜ un référentiel galiléen.
Une force centrale est une force dont le support passe constamment par un point O fixe dans un référentiel
galiléen. Le point O est appelé centre de force. La force peut être attractive ou répulsive.
f
G et OM
JJJJG sont donc colinéaires.
III.2 Le moment cinétique est une constante du mouvement
Théorème du moment cinétique en un point O fixe : d^0
d
O
OOM f
t
σ
=
Γ= =
G
G
J
JJJG
G
G
car
f
G
et OM
J
JJJG sont donc colinéaires.
On a donc conservation du moment cinétique : Octe
σ
=
J
JG
G
. On pose : OmC
σ
=
G
G
.
Le vecteur C
G est calculé avec les conditions initiales : À t = 0 :
(
)
00
0^
OtOMmvmC
σ
== =
J
JJJJGG
G
G.
On suppose dans la suite du cours que 0C≠
GG
. Le cas 0C
=
G
G correspond à une trajectoire rectiligne.
III.3 La trajectoire est plane
^
OOM mv mC
σ
==
JJJJGG
GG
. D’après les propriétés du produit vectoriel, on a COM⊥
J
JJJG
G
et Cv
⊥
G
G.
On utilise la première propriété : OM C⊥
JJJJGG
La trajectoire est plane : M se trouve dans le plan passant par O et orthogonal à C
G
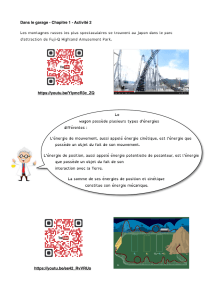
III.4 Le mouvement suit la loi des aires
On représente une figure dans le plan du mouvement. On choisit l’axe Oz de même direction que C
G
On pose
z
CCu=
GG. On a donc ^
Oz
OM mv mC mCu
σ
===
JJJJG
G
GG G
.
r
OM ru=
JJJJGG et r
vru ru
θ
θ
=+
GG G
On a donc :
()
2
^^
Orr z
OM mv ru m r u r u mr u
θ
σ
θθ
== +=
JJJJG
GGGGGG
On a donc 2
Ozz
mr u mCu
σθ
==
GGG
On définit la constante des aires = 2
Cmr
θ
=
On a vu dans le chapitre précédent que 2
d1d
d2d
Ar
tt
θ
=, soit d
d2
A
C
t
=
En séparant les variables, dd
2
C
A
t=
Le point M suit la loi des aires : en des temps égaux, le rayon vecteur balaie des aires égales.
http://www.sciences.univ-nantes.fr/physique/perso/gtulloue/Meca/Oscillateurs/Oscillat4.html

Q Moment cinétique – Forces centrales (33-203) Page 5 sur 8 JN Beury
Même intervalle de temps entre B et C qu’entre D et E.
Les aires balayées sont les mêmes.
III.5 Formules de Binet
a) Formule de Binet pour l’accélération
Pour un mouvement à force centrale, il est très intéressant de faire le changement de variable :
1
ur
= avec u fonction de
θ
. On définit d
'd
u
u
θ
= et
2
2
d
"d
u
u
θ
=
On cherche à exprimer l’accélération a
G en fonction de u, 'u, "u et C la constante des aires.
En coordonnées cylindriques, on a :
()
(
)
22
r
arru rru
θ
θθθ
=− + +
GG G
• On remarque que
()
2
1d 2
drrr
rt
θ
θθ
=+
. La composante de l’accélération suivant u
θ
G est donc nulle. C’est
prévisible puisqu’on a une force centrale portée par r
u
G
. On retrouve la loi des aires : 2
rcteC
θ
==
.
• 2
Cr
θ
=, donc 2
2
CCu
r
θ
==
• 1
ru
=, donc 2
22 2
d1 1d 1dd 1
'
dddd
uu
ruCu
tu u t u t u
θ
θ
−− −
=== =
puisque 2
Cu
θ
=
. On a donc : 'rCu=−
•
()
()
222
dd'd'd
'""
dddd
uu
rCuCC CuCuCuu
ttt
θ
θ
=− =− =− =− =−
On obtient donc finalement : 22"rCuu=−
et
()
2
2223
1
rCuCu
u
θ
==
Formule de Binet pour l’accélération (à connaître par cœur) :
()
22 "r
aCuuuu=− +
G
G
b) Formule de Binet pour la vitesse
r
vru ru
θ
θ
=+
GG G
, donc
()
()
()
2
2
22224222
2
1
''
vr r Cu CuCuu
u
θ
=+ = + = +
Formule de Binet pour la vitesse (à connaître par cœur) :
(
)
2222
'vCuu=+
III.6 Interaction newtonienne – Énergie potentielle effective
a) Définition d’une force d’interaction newtonienne
On considère deux points matériels M1 et M2 en interaction.
Ces points sont en interaction newtonienne si la force qui M1 exerce sur M2 est de la forme 12 12
2
k
fu
r
→→
=
GG
Attention, dans certains exercices, on rencontre la relation 2
k
r
−
au lieu de 2
k
r
Exemple : force de gravitation universelle, force de Coulomb.
• Si k > 0, la force est répulsive.
• Si k < 0, la force est attractive.
On va considérer par la suite un point M1 fixe en O l’origine du référentiel
(
)
,,,Oi jkℜ= G
G
G et M = M2.
On choisit les coordonnées sphériques car la force que M1 exerce sur M2 s’exprime facilement dans la base des
coordonnées sphériques : 12 2r
k
ffu
r
→==
GG G
 6
7
8
6
7
8
1
/
8
100%