Activités Pratiques EE

B. Aublin / D. Guérin 1/7 STI2D EE Eiffel Dijon
Activités Pratiques EE
Nom :
CI 4
Modélisation d’une chaîne d’énergie
AP1
Titre
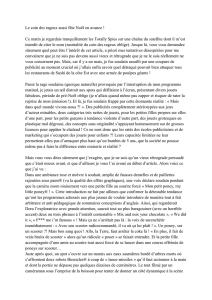
SCOOTER EVT
3h00
Problématique
L’exigence de franchissement est-elle respectée pour le scooter EVT ?
Objectifs
Modéliser le comportement en vitesse d’un scooter électrique,
Mettre en œuvre le logiciel de simulation Matlab Simulink (Simscape).
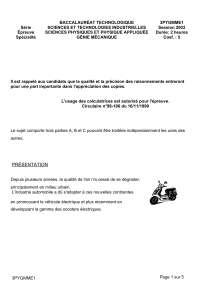
1 Données du cahier des charges du scooter EVT
technologie
Caractéristiques
Moteur
Batterie
Vitesse
mode Eco :
Mode Puissance :
Franchissement
Roue
Diamètre 40 cm
Poids à vide
Poids en charge
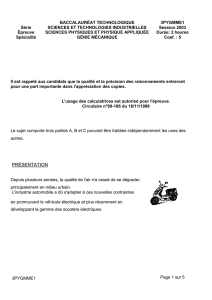
2 Description de la machine à courant continu du scooter EVT
constructeur
technologie
actionneur
Paramètres électriques
Paramètres mécaniques
Résistance d’induit R (Ω)
Moment d’inertie de la roue J (kg.m²)
0.1
Inductance de l’induit L (H)
Grandeurs électriques nominales
Constant de f.e.m
Tension nominale U (V)
Constante k (V/rd/s)
Courant nominal I (A)
Grandeurs mécaniques
Tableau 1
Vitesse nominale nn (tr/min)
Q1 Calcul de la vitesse nominale de la machine à courant continu
..............................................................................................................................................................................................................
..............................................................................................................................................................................................................

B. Aublin / D. Guérin 2/7 STI2D EE Eiffel Dijon
Q2 Calcul de la valeur nominale de l’intensité du courant dans la machine à courant continu
..............................................................................................................................................................................................................
..............................................................................................................................................................................................................
..............................................................................................................................................................................................................
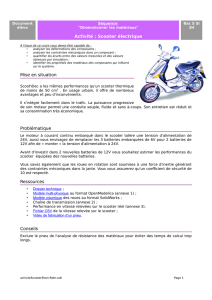
3 Mesure des paramètres de la machine à courant continu : R, L , k.
3.1 Mesure de la constante de fem
Démarche mise en œuvre
Instrumentation
variable mesurée
ordre de grandeur attendu
Instrumentation utilisée
repère
Schéma de câblage
Points d’observation du courant moteur
(fils par paire, passer ensemble ceux de couleurs rouge et noire
Points de mesure
(tension moteur entre les bornes rouge et bleue)

B. Aublin / D. Guérin 3/7 STI2D EE Eiffel Dijon
dans la boucle de la sonde de courant).
Q3 Compléter le tableau de mesures
U (V)
I (A)
n (tr/mn)
Q4 Reporter les mesures dans le fichier Mesure_de_k.xls et donner la valeur de la constante de f.e.m
................................................................................................................................................................................................................
..............................................................................................................................................................................................................
Q5 Compléter le tableau 1
3.2 Mesure de la résistance et de l’inductance
Un essai a été effectué et est à votre disposition dans le fichier Essai_rotor_bloqué.xls.
Q6 Déduire le calcul de la résistance et de l’inductance à partir de l’essai proposé.
................................................................................................................................................................................................................
................................................................................................................................................................................................................
................................................................................................................................................................................................................
................................................................................................................................................................................................................
Q7 Compléter le tableau 1.
4 Modélisation dans Matlab_Simulink
4.1 Scooter sur la béquille
Le premier modèle a pour but de vérifier la conformité du modèle à l’essai effectué pour la mesure de k.
Des ajustements de la tension batterie seront nécessaires pour ajuster le modèle à l’état de charge des batteries.
Rappel, pour trouver les éléments du modèle,
Clic Library Browser
rechercher en tapant le nom de l’élément
Q8 Quel est le coefficient de conversion K de m/s en km/h ?
................................................................................................................................................................................................................
..............................................................................................................................................................................................................

B. Aublin / D. Guérin 4/7 STI2D EE Eiffel Dijon
Q9 Lancer la simulation (temps de simulation 30 secondes) et lire la vitesse atteinte par le scooter en km/h ?
................................................................................................................................................................................................................
..............................................................................................................................................................................................................
Q10 En combien de secondes la vitesse maximum est-elle atteinte ? (le constructeur donne 15s) expliquer les écarts.
................................................................................................................................................................................................................
..............................................................................................................................................................................................................
Q11 A quelle valeur ajuster la tension batterie pour retrouver l’essai de mesure de la constante k ?
................................................................................................................................................................................................................
..............................................................................................................................................................................................................
4.2 Scooter avec conducteur
Sur la béquille, le moteur a une inertie très faible (0,1 kg.m2). Si on veut tenir compte dans le modèle de l’inertie due au poids du
scooter et du conducteur, il faut compléter le modèle par une inertie équivalente calculée à partir de l’énergie cinétique.
avec la relation ente la vitesse linéaire du scooter et angulaire de la roue
en remplaçant :
on trouve
Q12 Calculer l’inertie équivalente si vous êtes le conducteur du scooter.
................................................................................................................................................................................................................
..............................................................................................................................................................................................................
Q13 Compléter l’inertie équivalente avec sa nouvelle valeur dans le modèle matlab
Q14 En combien de secondes la vitesse maximum est-elle atteinte ? ((le constructeur donne 15 secondes sur terrain plat)
................................................................................................................................................................................................................
..............................................................................................................................................................................................................
4.3 Simulation du franchissement
Sur la route, le scooter doit vaincre 3 forces :
Force Aérodynamique
Force liée à la pente
Force de roulement (déformation des pneus)

B. Aublin / D. Guérin 5/7 STI2D EE Eiffel Dijon
Pour simuler ces trois efforts, Il faut ajouter au modèle une charge (source de force idéale).
Le port S de la charge permet de rentrer la valeur de l’effort, variable selon la pente. Le bloc Signal
Builder permet de dessiner le profil d’effort attendu : sur le plat, pente à 8% et pente à 15 %.
Force aérodynamique
Cx = 0,8 ; Surface frontale S = 0,9 m² ; densité de l’air à 20°C
= 1,2kg/m3
Q15 Calculer la force aérodynamique pour la vitesse trouvée précédemment.
................................................................................................................................................................................................................
..............................................................................................................................................................................................................
Force liée à la pente
Masse totale : M=Scooter + conducteur (vous) : Gravité g=9,81 m/s2
une pente à 8%, correspond à une élévation de 8m sur une distance de 100m
Ce qui correspond à la tangente de l’angle θ
soit et
Q16 Calculer la force liée à la pente de 8%
................................................................................................................................................................................................................
..............................................................................................................................................................................................................
Q17 Calculer la force liée à la pente de 14%
................................................................................................................................................................................................................
..............................................................................................................................................................................................................
Force de roulement
Coefficient de résistance au roulement Rf = 0,03 ; Masse totale : M=Scooter + conducteur (vous) : Gravité g=9,81 m/s2
Q18 Calculer la force de roulement
................................................................................................................................................................................................................
..............................................................................................................................................................................................................
Q19 Compléter le tableau
Route
Force aerody.
Force roul.
Force pente
Total
plat
pente à 8%
pente à 14%
Q20 Dessiner le graphe des efforts dans Signal Builder (Attention, les efforts s’opposent au mouvement, les compter négatifs)
θ
8 m
plat
pente 8 %
pente 14 %
30 secondes
 6
7
6
7
1
/
7
100%