Chapitre II : Conversion électromécanique 1. Force de Laplace

Spéciale PSI - Cours "Conversion de puissance" 1
Conversion électromécanique
Chapitre II : Conversion électromécanique
Objectifs :
•Rappel sur la force de Laplace et l’induction électromagnétique;
•Etude des conversions électromécaniques.
1. Force de Laplace
1.1.Force de Lorentz
On considère une particule M,demassem,dechargeq, animée d’une vitesse
vpar rapport au référentiel . On suppose
de plus qu’il règne en tout point de l’espace un champ électromagnétique (
E,
B).
La particule Mest soumise à la force de Lorentz
FLorentz =q(
E+
v
B)
Remarque : cette force se décompose en deux composante :
·une composante électrique
Fe=q
Ecolinéaire à
E;
·une composante magnétique
F=qv
Bperpendiculaire à
B; cette composante ne produit aucun travail
W=
F.d
M=(q
v
B).d
M=(qv
B).
vdt=0
1.2. Densité volumique de forces magnétiques
Soit un conducteur plongé dans un champ magnétique
B.Onnotela densité volumique de porteurs de charge dans ce
conducteur.
La force magnétique d
Fqui s’exerce sur un élément de volume dde ce conducteur, de charge q, animée d’une vitesse
v
par rapport au référentiel est
d
F=q
v
B=dv
B=
jd
Bavec j=v=vecteur densité de courant (1 seul type de porteur).
Ce conducteur est donc soumis à une densité volumique de force magnétique
f=d
F
d=j
B
1.3. Cas des circuits liformes
Soit un conducteur &liforme, de section
set de longueur élémentaire dLet parcouru par un courant i=j.
s.Laforce
magnétique qui s’exerce sur ce conducteur est :

Conversion de puissance. Chapitre II : Conversion électromécanique 2
d
F=fd=
j
Bdavec d=s.d
L
d
F=j
Bs.d
L=j
s.d
L
B=j.
sd
L
B=idL
B
L’élément de courant id
Lplacé dans un champ magnétique
B
est soumis à la force de Laplace d
F=idL
B.
2. Rappels : Induction électromagnétique
Pour une maille fermée, mobile dans un champ magnétique variable
B, la f.e.m. d’induction est donnée, au choix, par :
•la loi de Faraday :
e=d
dt
où (t)est le +ux à travers le circuit, c’est à dire le +ux créé par les sources extérieures au circuit et par le circuit
lui-même, et d
dt représente la dérivée totale du +ux (t)tenant compte du déplacement du circuit et de la variation de
B.
•la circulation des champs électromoteur de Lorentz et de Neumann :
e=eL+eN=Cve
B.d
+C
A
t.d
3. Conversion électromécaniques de puissance
Onseplacedanslecasdeschamps magnétiques permanents, la f.e.m. d’induction est donc donnée par e=eL=
Cve
B.d
.
3.1. Mouvement d’un courant dans un champ magnétique permanent
On conserve les mêmes notations que précédement ; on suppose de plus que tous les porteurs de charges sont du même
type (charge qet densité volumique n)etonnotevr(vitesse relative) leur vitesse par rapport à un référentiel lié au
conducteur lui même animé d’une vitesse ve(vitesse d’entraînement) par rapport au référentiel dans lequel règne un
champ magnétique
Bpermanent. Dans une telle situation :
•chaque porteur de charge est soumis à la force de Lorentz
F=q
v
B=q(
vr+ve)
B;
•le champ électromoteur est donné par
Em=
ve
B;
•l’élément de courant id
Lest le siège d’une f.e.m. induite de =ve
B.d
L.
3.2. Bilan de puissance des forces de Lorentz
La force de Lorentz d
Fqui s’exerce sur les porteurs de charges contenus dans un élément de volume ddu conducteur est :
d
F=q
v
B=(nqd)(
vr+ve)
B
On rappelle que la puissance des forces de Lorentz est nulle car
E=
0(dans ):
dP =d
F.
v=0(nqd)(
vr+ve)
B.[vr+
ve]=0
(nqd)(vr
B).
vr+(
vr
B).ve+(
ve
B).vr+(
ve
B).
ve=0
Deux termes parmi les quatre ci-dessus sont nuls :
(nqd)(
vr
B).ve+(
ve
B).
vr=0
On remarque alors que :
•dPe=nqd(
ve
B).vr=(
ve
B).
jd=
Em.jd=
Em.i
dL =i
Em.
dL =ide est la puissance électrique
fournie par la f.e.m. induite de ;

Conversion de puissance. Chapitre II : Conversion électromécanique 3
•dPL=nqd(
vr
B).ve=(
jd
B).ve=(i
dL
B).ve=d
F.
veest la puissance des forces de Laplace d
F.
ce qui donne dPe+dPL=0pour l’élément de courant i
dL soit pour la totalité du circuit Pe+PL=0.
Lors du déplacement d’un circuit liforme dans un champ magnétique permanent, la puissance
électrique de le f.e.m. induite est opposée à la puissance mécanique des forces de Laplace :
Pe+PL=0
Cette égalité est la base des conversions électromécaniques. La conversion repose sur le fait que la puissance de la
force magnétique subie par un porteur de charge est nulle, et sur le fait que la force magnétique contribue :
•au mouvement de la charge dans le &l pour sa composante suivante le &l (fém induite) ;
•au mouvement du &l pour sa composante perpendiculaire au &l (force de Laplace).
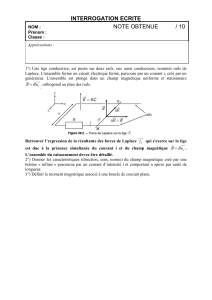
3.3. Exemple : les rails de Laplace
On considère le dispositif ci-dessus constitué de deux rails parallèles distants de d, dans un plan horizontal, sur lesquels
peut se mouvoir une tige perpendiculaire aux rails. L’ensemble est plongé dans un champ magnétique vertical uniforme et
constant. On choisit un repère cartésien comme indiqué sur la &gure. L’orientation du circuit est celle de i.
On note
ve=V.uyla vitesse de translation de la tige, Pet Qles points de contact avec les rails,
B=B.
uzle champ
magnétique.
Le champ électromoteur en tout point de la tige est
Em=ve
B=VB.
ux. La force électromotrice eest égale à la
circulation de ce champ sur le tronçon QP :
e=QP
Em.d l=VBd
Comme il circule un courant d’intensité idans la tige (quelle que soit son origine : dipôle générateur placé dans le circuit ou
courant induit par la f. e. m. précédente), celle ci est soumise à la force de Laplace
F=i.(dux)
B=idB
uy.
Pour les puissances on a :
•La puissance électrique (de la f.e.m. induite) est :
Pe=ei =VBdi
•La puissance mécanique (de la force de Laplace) s’écrit :
PL=
F.ve=idBV
Le bilan de puissance peut donc s’écrire PL+Pe=0. On retrouve bien que la puissance électrique de le f.e.m.
induite est opposée à la puissance mécanique des forces de Laplace.
3.4. Transducteurs électromécaniques
Nous généralisons les résultats précédents en ajoutant des pertes mécaniques (par frottement de la tige sur les rails) et des
pertes électriques (par e6et Joule dans la résistance du circuit).
Nous pouvons envisager deux régimes de fonctionnement :
•fonctionnement moteur (traction) : une source externe impose un courant idans le circuit électrique, une force de
Laplace apparaît donc qui peut mettre en mouvement la tige, cette dernière pouvant entraîner une charge mécanique
(pompe ... ). La puissance P´elec ext cédée sous forme électrique par la source va être convertie pour partie en puissance
calori&que (perdue par e6et Joule PJ) et pour partie en puissance mécanique qui pourra :

Conversion de puissance. Chapitre II : Conversion électromécanique 4
—accroître l’énergie cinétique du système (phase de démarrage, d’accélération d’un mobile),
—être dissipée sous forme de chaleur dans les frottements mécaniques Pfrot,
—être cédée à la charge mécanique Pm´ec.
En régime établi, l’énergie cinétique du système est une constante et le bilan de puissance s’écrit:
P´
elec ext PJ=Pe=PL=Pm´ec +Pfrot
Conversion d’une puissance électrique en puissance mécanique
Remarque : On notera que la mise en mouvement de la tige est responsable de l’apparition de la force électromotrice e;
parfois e=eest appelée force contre-électromotrice du fait de son sens.
•fonctionnement générateur : un dispositif mécanique extérieur met en mouvement la tige, il apparaît alors un champ
électromoteur d’induction qui peut, si le circuit est fermé sur une charge électrique, créer un courant. Le dispositif
d’entraînement fournit une puissance mécanique Pm´ecext
, dont une partie va être dissipée sous forme de chaleur dans
les frottements mécaniques Pfrot, et le reste sera convertie en puissance électrique Pe, dont une partie sera perdue par
e6et Joule PJ.
En régime établi, l’énergie cinétique du système est une constante et le bilan de puissance s’écrit:
Pm´ecext Pfrot =PL=Pe=P´elec +PJ
Conversion d’une puissance mécanique en puissance électrique

Conversion de puissance. Chapitre II : Conversion électromécanique 5
Remarques :
1) On notera que l’apparition du courant dans le circuit est responsable de l’apparition de la force de Laplace parfois
appelée force résistante du fait de son sens.
2) En pratique, l’apparition de la force électromotrice en fonctionnement moteur ou de la force mécanique résistante en
fonctionnement générateur pourra modi&er les conditions du fonctionnement (courant électrique dans le premier cas, vitesse
dans le second).
4. Transducteurs électromécaniques
4.1. Dénition
Un transducteur électromécanique est un dispositif pouvant réaliser soit la conversion d’une énergie mé-
canique (aux pertes par frottement près) en énergie électrique (aux pertes par e2et Joule près), soit la
conversion inverse d’une énergie électrique (aux pertes par e2et Joule près) en énergie mécanique (aux
pertes par frottement près).
Il existe une très grande variété de transducteurs électromécaniques, d’une importance pratique considérable
: moteurs, dynamos, alternateurs, haut-parleurs. microphones, etc.
4.2. Exemple du haut-parleur
D’après Banque d’épreuves Archimède - CONCOURS 1998 - Option: PC.
HAUT-PARLEUR ELECTRODYNAMIQUE
Un haut-parleur est constitué d’une bobine plate (b)d’axe zz(de résistance R, d’inductance L, comportant Nspires
de rayon a) solidaire d’une membrane pouvant se déplacer parallèlement à elle-même, suivant la direction zznormale à son
plan. L’équipage mobile (bobine + membrane) a pour masse totale m. Lorsque la bobine s’écarte de sa position d’équilibre
d’un écart algébrique z, elle est rappelée par une force élastique due à un ressort de raideur k. De plus, l’air produit sur la
membrane une force de frottement visqueux, proportionnelle à sa vitesse de déplacement, qui peut s’écrire:
f=hv(h>0).
La bobine est placée dans un champ magnétique uniforme
Bradial, normal à zz, créé par un aimant permanent (A).
(voir &gure 1.)
1) Analyse préliminaire
1*a. Expliquer pourquoi un mouvement de la membrane crée dans la bobine une force électromotrice d’induction et
comment une di6érence de potentiel de même fréquence que le mouvement apparaît aux bornes de (b). Quel rôle ce dispositif
peut-il jouer ?
1*b. On applique aux bornes de (b)une tension sinusoïdale. Montrer que cette tension va engendrer un mouvement de la
bobine. Qu’advient-il des masses d’air voisines de la membrane ? Quel est alors le rôle du dispositif ?
 6
7
6
7
1
/
7
100%