Chapitre 6 : Applications des lois de Newton Chapitre 6

Chapitre 6 : Applications des lois de Newton
1
Chapitre 6 : Applications des lois de Newton
Compétences à acquérir :
Démontrer que, dans l’approximation des trajectoires circulaires, le mouvement d’un satellite, d’une planète, est uniforme. Établir
l’expression de sa vitesse et de sa période.
Connaître les trois lois de Kepler ; exploiter la troisième dans le cas d’un mouvement circulaire.
Les lois de Newton peuvent être appliquées à presque tous les systèmes à condition que ces systèmes se déplacent à
des vitesses faibles par rapport à celle de la lumière. C’est le cas pour toutes les situations de la vie courante.
I Mouvement d’un projectile dans un champ de pesanteur uniforme
Cadre de l’étude :
on considère que seul le poids s‘exerce sur le projectile (force de frottement et poussée d’Archimède
négligées)
le champ de pesanteur est uniforme
I.1 Référentiel – repère
On réalise l’étude dans le référentiel terrestre considéré galiléen.
Lancer du projectile et choix du repère ainsi que de l’origine des dates
Le projectile est lancé avec une vitesse initiale (vitesse à t = 0)
. La vitesse initiale fait un angle avec
l’horizontale. La position du projectile à t = 0 est choisie l’origine du repère (cas particulier simple).
On peut choisir un repère Oxyz tel que le plan Oxy par exemple contient le vecteur
et le vecteur champ de
pesanteur .
Dans ce cas le vecteur la vitesse initiale a pour expression :

Chapitre 6 : Applications des lois de Newton
2
I.2 Bilan des forces extérieures, application de la deuxième loi de Newton, expression de l’accélération
………………………………………………………………………………………………………………………….
………………………………………………………………………………………………………………………….
I.3 Application de la 2ème de Newton et détermination du vecteur accélération
………………………………………………………………………………………………………………………….
………………………………………………………………………………………………………………………….
I.4 Recherche de l’expression du vecteur vitesse
Au chapitre précédent nous avons vu que
et
où G est le centre d’inertie, , et
respectivement l’accélération, la vitesse et la position de G.
On peut donc utiliser le diagramme ci-contre
Pour déterminer le vecteur vitesse il faut donc …………………………………le vecteur accélération :
donc
or à t = 0, les composantes du vecteur vitesse sont :
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………
On en conclut que
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………
Finalement
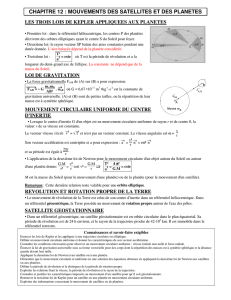
Position Vitesse Accélération
Dérivation
Dérivation
Intégration
Intégration

Chapitre 6 : Applications des lois de Newton
3
I.5 Recherche de l’expression du vecteur position
Déterminer les composantes du vecteur position revient à rechercher ............................................................. du
vecteur vitesse.
donc
or à t = 0, les composantes du vecteur position (conditions initiales sur la position) sont :
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
………………………………………………………………………………………………………………………….
On en conclut que
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
Le mouvement est plan car l’une des composantes du vecteur position …………………………………
Finalement
I.6 Trajectoire
La trajectoire est la courbe qui représente …………………………………….…….de G au cours du temps.
Elle ne fait apparaître que de variables d’espace, le paramètre temps en est absent.
A partir des équations horaire, on peut déduire que t = …………………….
Donc y = ……………………………………………………………………………………………………………….
……………………..…………………………………………………………………………………………………...
………………………………………………………………………………………………………………………….

Chapitre 6 : Applications des lois de Newton
4
II Mouvement d’une particule chargée dans un champ électrique uniforme
Cadre de l’étude : on considère que seule la force électrique intervient (poids négligé et chocs avec d’autres
particules inexistants)
Il est évident que la situation de la particule chargée dans un champ électrique uniforme présente une analogie avec
la situation du corps de masse m dans un champ de pesanteur uniforme.
II.1 Choix du repère
On choisit le repère de façon que les vecteurs vitesse initiale et champ électrique soient contenus dans le plan Oxy.
De plus on peut choisir l’axe Oy dans la même direction que le champ électrique, mais pas forcément dans le
même sens.
II.2 Bilan des forces extérieures, application de la deuxième loi de Newton, expression de l’accélération
………………………………………………………………………………………………………………………….
………………………………………………………………………………………………………………………….
Comme dans le cas du mouvement d’un projectile, le mouvement est ……………………………………………….
On choisit l’axe Oy dans le sens contraire du champ électrique donc le vecteur champ s’exprime par ……………
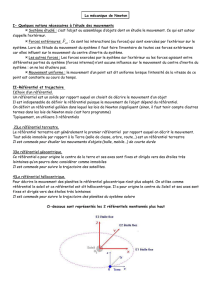
Particule chargée dans un champ électrique uniforme
E
E
E
x
y
O
v0
Champ électrique régnant entre deux armatures espacées de e
et soumises à une tension électrique U :
Direction : orthogonal aux armatures
Sens : de l’armature chargée positivement ver
l’armature chargée négativement
Valeur :
Unité : V/m

Chapitre 6 : Applications des lois de Newton
5
Mouvement dans un champ de pesanteur
Expression de la force : ………………….
Trajectoire : ………………………………………….
Mouvement dans un champ électrique
Expression de la force : ………………….
Trajectoire : …………………………………………
Remarques :
A. Selon le signe de la charge de la particule, la force électrique est dirigée vers le haut ou vers le bas, de même
pour la concavité de la trajectoire.
B. Selon le repère choisi (orientation des axes, position de l’origine) et l’origine des dates, les équations horaires et
de la trajectoire peuvent ne pas être celles écrites plus haut.
 6
7
6
7
1
/
7
100%