BE Trottinette - Etud.insa

4AE-SE/IS BE Trottinette
– UF Chaîne d'acquisition et commande numérique
BE Trottinette
(UF Chaîne d'acquisition et commande numérique)
Table des matières
1.Objectifs............................................................................................................................................2
2.Evaluation..........................................................................................................................................2
3.Description globale (point de vue électrique)...................................................................................3
3.1.La trottinette : description du système à commander................................................................3
3.2.Le dispositif de commande et d'adaptation électronique...........................................................3
3.3.Vue globale de l'ensemble trottinette + commande ..................................................................4
4.Présentation détaillée des éléments constitutifs de la trottinette.......................................................5
4.1.Le moteur...................................................................................................................................5
4.2.Le capteur de courant.................................................................................................................5
4.3.Le capteur de vitesse..................................................................................................................6
5.Présentation détaillée des éléments constitutifs de la commande.....................................................6
5.1.La plaque d'essai........................................................................................................................6
5.2.La carte micro-contrôleur..........................................................................................................7
6.Présentation des dispositifs logiciel / matériel de simulation............................................................7
6.1.Simulation sous KEIL................................................................................................................8
6.2.Simulation matérielle de l'ensemble moteur–capteur de courant .............................................8
6.3.Simulation matérielle de l'induit du moteur, 6A max................................................................9
6.4.Simulation matérielle de la trottinette........................................................................................9
7.Spécifications..................................................................................................................................10
7.1.Spécifications de la boucle de courant (couple) .....................................................................10
7.2.Spécifications de la boucle de vitesse......................................................................................11
7.3.Spécifications des traitements de capteur ...............................................................................11
8.Méthode de travail...........................................................................................................................12
8.1.Sous Matlab.............................................................................................................................12
8.2.Sous KEIL................................................................................................................................12
8.3.Sur plaque d'essais...................................................................................................................12
BE_Trottinette_2012_2013.odt
P.Acco -
M.AIME – T.ROCACHER
1/12

4AE-SE/IS BE Trottinette
– UF Chaîne d'acquisition et commande numérique
1. Objectifs
•Concevoir un asservissement numérique de couple et de vitesse d'un moteur pour trottinette
électrique. L'accent est mis sur l'autonomie et la prise d'initiatives.
Pour cela il faudra franchir plusieurs étapes :
•Analyser le système existant (éventuellement, exploiter le dossier relatif à un ancien système
hybride analogique / numérique)
•Concevoir une électronique de traitement des capteurs (courant, tachymètre)
•Modéliser le dispositif sous MATLAB en temps continu
•Concevoir le correcteur en temps continu
•Discrétiser le correcteur, choisir une fréquence d'échantillonnage
•Analyser l'impact de l'échantillonnage sur la stabilité du système
•Mettre en oeuvre la ou les commandes sur STM32F103RB, KEIL.
Contraintes :
•Système embarqué, tensions disponibles 0V, 5V et 18V.
•Réalisation électronique sur plaque d'essais
•Utilisation d'un simulateur de capteur courant
•Utilisation d'une charge R-L 6A max pour simuler l'induit du moteur
•Utilisation d'une trottinette de table
•Utilisation de la trottinette réelle
•Travail sous KEIL, possibilité d'utiliser vos modules périphériques, ou d'utiliser une
bibliothèque toute faite (.a et .h, aucun fichier source C donné).
•Obligation de hiérarchiser le logiciel en couches Appli / Service / Périphérique
2. Evaluation
Le travail de bureau d'étude (les 8 séances) donne lieu à une note. Celle-ci sera basée sur la lecture
d'un rapport de conception à remettre en fin de BE, et sur l'investissement en TP (contrôle continu).
BE_Trottinette_2012_2013.odt
P.Acco -
M.AIME – T.ROCACHER
2/12

4AE-SE/IS BE Trottinette
– UF Chaîne d'acquisition et commande numérique
La note pourra être différenciée au sein d'un même binôme.
Critère d'évaluation du rapport :
–la structure du rapport
–la clarté des explications
–la qualité des calculs de conception (littéral puis numérique)
–la richesse des mesures faites ainsi que leurs précisions et leurs commentaires
(explication de chaque mesure, axes des chronogrammes....)
–la capacité à critiquer ses propres mesures (comparaison théorie / simulation/ réalité des
mesures)
–Avancement dans le projet, adéquation au cahier des charges
3. Description globale (point de vue électrique)
3.1. La trottinette : description du système à commander
Du point de vue du fonctionnement électrique, elle est constitué de :
–1 moteur 24V/100W (pouvant accepter presque 10A au démarrage et au freinage
–1 carte de puissance qui comprend un hacheur 4 quadrants, le capteur de courant, les
alimentations 0V, 5V et 18V / 500mA maxi au total
–1 capteur de vitesse (petit moteur cc en génératrice)
–2 batteries de 12V en série qui donnent 24V /10A
–1 potentiomètre de consigne 2,2KΩ.
3.2. Le dispositif de commande et d'adaptation électronique
Afin de commander le système décrit précédemment, il faut rajouter les éléments de commande:
–1 Carte micro-contrôleur, essentiellement basée sur un STM32F103RB
–1 carte d'adaptation capteur (une plaque d'essais en fait).
BE_Trottinette_2012_2013.odt
P.Acco -
M.AIME – T.ROCACHER
3/12

4AE-SE/IS BE Trottinette
– UF Chaîne d'acquisition et commande numérique
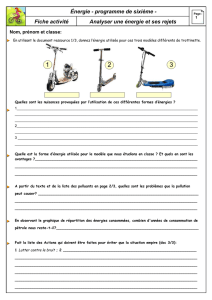
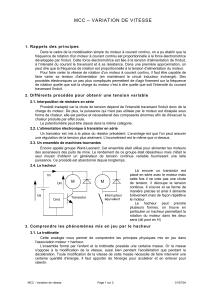
3.3. Vue globale de l'ensemble trottinette + commande
Légende des blocs:
Légende des signaux :
BE_Trottinette_2012_2013.odt
P.Acco -
M.AIME – T.ROCACHER
4/12
Carte
puissance Moteur
24V/100W
Batterie
24V / 10A
Potentiomètre
de consigne
Plaque d'essais
Carte micro
Capt.
Courant
U
M
I
M
E
Batt
I
Batt
V
Courant
0V
5V
18V
In+
In-
V
Vitesse
PWM+
PWM-
Capteur
de vitesse
Roue
arrière
Courroie de
transmission
crantée
Roue
crantée
Arbre
moteur
Info_Courant
Info_Vitesse
Blocs appartenant à la trottinette
Blocs appartenant à la commande
Reférence 0V
Alimentation positive, 3,3V ou 5V ou 18V
24V, courant important
Signaux de type information
Signaux hybrides (information + puissance)

4AE-SE/IS BE Trottinette
– UF Chaîne d'acquisition et commande numérique
4. Présentation détaillée des éléments constitutifs de la
trottinette
4.1. Le moteur
Il s'agit d'un moteur d'une qualité très moyenne, à forte résistance d'induit.
Caractéristiques électriques de l'induit :
Résistance de l'induit : R=1,0 Ω
Inductance de l'induit : L=2 mH
Vitesse maximale : 3000 tr/mn
Puissance absorbée nominale , Pabs: 100W
Puissance restituée à l'arbre : = …pas tant que ça !
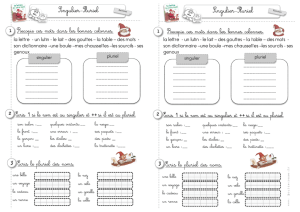
4.2. Le capteur de courant
Principe de fonctionnement :
Le schéma présenté est un capteur de courant de type “boucle fermée”. Il utilise un capteur à effet
Hall inséré dans un tore magnétique. Lorsqu'un courant Ip traverse l'enroulement primaire, il va
induire un champ magnétique B. L'amplitude de ce champ dépend du produit Np.Ip, où Np est le
nombre de spires primaires. Comme Ip est susceptible d'être élevé, Np est faible.
Au niveau du secondaire, on peut observer une boucle de régulation. La consigne (entrée +) est
nulle. La boucle de régulation va donc agir de manière à ce que le capteur (sonde qui délivre un
BE_Trottinette_2012_2013.odt
P.Acco -
M.AIME – T.ROCACHER
5/12
Primaire,
courant élevé
(<15A), 3 spires
environ
Secondaire,
courant faible
(qques
mA),2000
spires environ
Sonde à effet
Hall
I
P
I
s
B
+
-
Tore magnétique
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%