MCC - Variation de vitesse Page 1 sur 2 01/07/04
MCC – VARIATION DE VITESSE
1. Rappels des principes
Dans le cadre de la modélisation simple du moteur à courant continu, on a pu établir que la
fréquence de rotation d'un moteur à courant continu est proportionnelle à la force électromotrice
développée par l'induit. Cette force électromotrice est liée à la tension d'alimentation de l'induit,
à l'intensité du courant le traversant et à sa résistance. Dans une première approximation, on
peut dire que la fréquence de rotation est proportionnelle à la tension d'alimentation du moteur.
Pour faire varier la vitesse de rotation d'un moteur à courant continu, il faut être capable de
faire varier sa tension d'alimentation (en maintenant le circuit inducteur inchangé). Des
procédés électroniques un peu plus compliqués permettent de d'agir finement sur la fréquence
de rotation quelle que soit la charge du moteur c'est à dire quelle que soit l'intensité du courant
traversant l'induit.
2. Différents procédés pour obtenir une tension variable
2.1. Interposition de résistors en série
Procédé inadapté car la chute de tension dépend de l'intensité traversant l'induit donc de la
charge du moteur. De plus, la puissance qui n'est pas utilisée par le moteur est dissipée sous
forme de chaleur, elle est perdue et nécessiterait des composants énormes afin de d'évacuer la
chaleur produite par effet Joule.
Le potentiomètre peut être classé dans la même catégorie.
2.2. L'alimentation électronique à transistor en série
Un transistor est mis à la place du résistor précédent. L'avantage est que l'on peut assurer
une régulation de la tension plus aisément. L'inconvénient est le même que ci-dessus.
2.3. Un ensemble de machines tournantes
Encore appelé groupe Ward-Leonard. Cet ensemble était utilisé pour alimenter les moteurs
des ascenseurs des puits de mine. Le rendement de ce groupe était désastreux mais c'était le
seul moyen d'obtenir un générateur de tension continue variable fournissant une telle
puissance. Ce procédé est abandonné depuis longtemps.
2.4. Le hacheur Là encore un transistor est
placé en série avec le moteur mais
cette fois il ne crée pas une chute
de tension, il découpe la tension
continue. Il s'ouvre et se ferme de
manière précise et ainsi il alimente
brièvement mais de façon répétitive
le moteur.
Le hacheur peut prendre
plusieurs formes, on trouve en
particulier un hacheur permettant la
rotation du moteur dans les deux
sens (dit pont en H)
3. Comprendre les phénomènes mis en jeu par le hacheur
3.1. La trottinette
Cette analogie nous permet de comprendre les principes physiques mis en jeu dans
l'association moteur + hacheur.
L'ensemble formé par l'enfant et la trottinette possède une certaine masse. Or la masse
s'oppose à la modification de la vitesse, aussi bien pendant l'accélération que pendant la
décélération. Toute modification de la vitesse de cette masse nécessite de faire intervenir une
certaine quantité d'énergie. Il faut apporter de l'énergie pour accélérer et en enlever pour
ralentir.
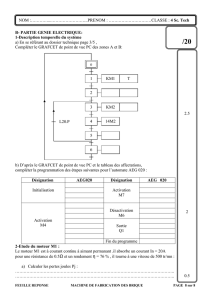
Ua
Um
Im
Transistor
M
Interrupteur
équivalent
M
Cmd

MCC - Variation de vitesse Page 2 sur 2 01/07/04
Une fois lancée, par l'impulsion donnée par le pied, la trottinette poursuit son mouvement. Le
ralentissement est faible parce que les frottements sont faibles. L'impulsion ne provoque pas
une augmentation brusque de la vitesse car la masse s'y oppose.
Globalement la trottinette (et l'enfant) se déplacent à vitesse pratiquement constante.
3.2. Le moteur et la trottinette
On trouve, dans le moteur, deux principes équivalents à la masse de la trottinette.
L'induit est constitué par un bobinage qui possède une résistance et une inductance. Dans
ces conditions, le courant ne peut ni s'établir ni s'éteindre instantanément. La constante de
temps électrique (association résistance inductance) quantifie l'opposition à la variation du
courant.
L'induit est de la matière animée d'un mouvement de rotation, il se comporte comme un
volant d'inertie qui s'oppose à toute modification de la fréquence de rotation. Le moment
d'inertie caractérise le volant d'inertie équivalent. On appelle constante de temps mécanique
le nombre qui quantifie l'association du moment d'inertie et du coefficient de frottement (sur les
paliers)
3.3. L'équivalent du coup de pied
Le moteur est alimenté par des impulsions de tension. Si la fréquence de ces impulsions est
suffisante, les constantes de temps électrique et mécanique font que la fréquence de rotation
est constante.
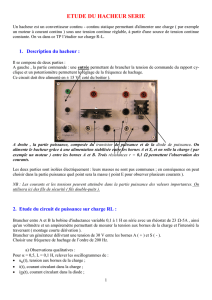
4. Une tension continue formée d'impulsions ?
La tension d'alimentation est découpée par le hacheur. Le
moteur voit une tension ayant la forme ci-contre.
Pendant t1, le transistor est fermé, la période du signal est T
On peut se poser les questions suivantes :
- Comment le moteur accepte-t-il ces impulsions alors qu'il est
prévu pour fonctionner sous tension continue ?
- En quoi le découpage de la tension produit-il une variation
de vitesse ?
4.1. Analyse qualitative
Imaginons le moteur alimenté par une telle tension. Pendant t1, il est soumis à une tension,
la fréquence de rotation augmente ainsi que le courant traversant l'induit. Pendant le reste de la
période, la vitesse et le courant diminuent. Or les constantes de temps tendent à limiter les
variations (de courant et de fréquence de rotation). Il suffit d'adopter une période T
suffisamment faible pour que les variations soient négligeables autour d'une valeur moyenne
constante.
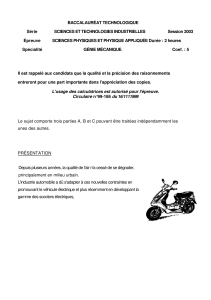
4.2. Analyse quantitative La fréquence de rotation se fixe autour d'une valeur
moyenne. Calculons la valeur moyenne de la tension découpée
par le hacheur.
Les deux rectangles marqués ont des surfaces égales. U est
la valeur moyenne de la tension découpée.
TUtE
1
×
=
×
le quotient
T
t
1
porte le nom de rapport cyclique
La tension d'alimentation amont (E) étant constante, la valeur moyenne de la tension
d'alimentation du moteur dépend du rapport cyclique.
La période T doit être suffisamment faible pour s'adapter aux caractéristiques du moteur.
4.3. Les avantages du hacheur
Le rendement théorique du hacheur est unitaire c'est à dire que ce dernier ne consomme
aucune énergie contrairement aux principes précédents.
Les composants électroniques permettent de réaliser des hacheurs de toutes puissances,
les dispositifs de commande peuvent faire partie d'une chaîne d'information sophistiquée qui
permet la régulation de vitesse c'est à dire que la vitesse est maintenue constante si
nécessaire.
u
E
t
t1 T
u
E
t
t1 T
U
1
/
2
100%