dossier

Anne-Laure Delaye
Aude Latrive
Astrid Verpeaux
O
Ol
ly
ym
mp
pi
ia
ad
de
es
s
d
de
e
p
ph
hy
ys
si
iq
qu
ue
e
2
20
00
06
6-
-2
20
00
07
7
Lycée Hoche, Versailles
Professeurs : Mme Larasse
M. Brasselet
P
Pe
eu
ut
t-
-o
on
n
m
ma
ar
rc
ch
he
er
r
s
su
ur
r
l
l’
’e
ea
au
u
?
?

2
C’est dans le cadre d’un atelier de sciences expérimentales que
nous avons commencé en première S ce projet. Notre but était de
participer aux Olympiades de Physique 2006-2007, mais nous avons
également présenté le concours Faites de la science en juin dernier ;
nous avons donc continué cette année en Terminale scientifique.
Nous nous sommes d’abord orientées vers tout ce qui concerne
l’eau, la capillarité, la tension superficielle, ce qui nous a conduites à
nous intéresser aux araignées d’eau capables de marcher sur l’eau.
Après plusieurs recherches sur ce domaine, nous avons découvert
l’existence du lézard Basilic, qui est devenu le centre de notre projet.
Afin de nous aider dans nos expériences, nous nous sommes
rendues à l’ESPCI et avons rencontré après plusieurs échanges de
mails Etienne Reyssat, étudiant en dernière année de thèse et
spécialisé dans la mécanique des fluides.

3
Sommaire
I. Le lézard basilic : présentation (page 4)
II. Modélisation du lézard (page 5)
1. Expérience des plaques
2. Le coureur motorisé
a. Dispositif expérimental
b. Tableau de valeurs et exploitation
c. Analyse de graphique et explications éventuelles
3. Expérience du « ski-nautique »
III. Bernoulli : la bonne solution ? (page 14)
1. Utilisation des données de l’article
a. Données
b. Calculs
2. Application à l’homme
3. Tension superficielle

4
Peut-on marcher sur l’eau ?
Introduction:
Peut-on marcher sur l'eau? Une question qui nous intéressait beaucoup, c’est pour cela
qu’après quelques tentatives infructueuses à la piscine, nous avons décidé d’approcher
le sujet de manière aussi expérimentale, mais plus construite. Nous avons découvert
l’existence d’un lézard, nommé le « basilic » qui arrive à se déplacer sur l'eau en
courant. Il enfonce sa patte dans l'eau lorsqu'il court ce qui montre l'existence d'une
force qui lui permet de prendre appui pour ressortir sa patte de l'eau et ainsi avancer.
D'où vient cette force qui le porte? Est-ce que l'Homme peut l'imiter ? Cette force peut-
elle s'appliquer à son cas? C'est donc cette force exercée par l'eau que nous allons nous
attacher à étudier.
I. Le lézard basilic : présentation
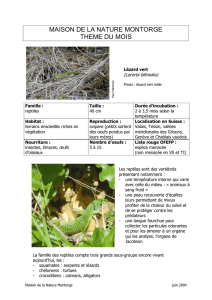
Le lézard basilic, ou « jesus lizard », pèse entre 2 et 200 grammes. Il vit en Afrique
centrale et en Amérique du Sud.
Il mesure environ 5 cm sans sa queue et 10 avec, et possède des pattes arrière
légèrement palmées.
La particularité de ce lézard basilic est qu’il peut courir sur l’eau, à la vitesse de 1.5m/s
environ. Nous avons regardé une vidéo qui le montre lorsqu’il court sur l’eau, et avons
observé que :
o il court sur l’eau en se servant uniquement de ses deux pattes arrière. Sa queue
l’aide à se stabiliser.
o son mouvement se décompose en trois parties (et des recherches déjà
effectuées sur le sujet le confirment) :
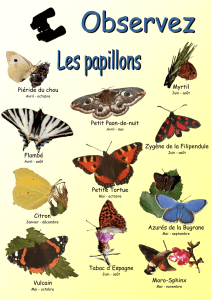
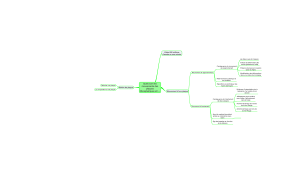
la frappe : le lézard frappe verticalement l’eau.
Interface
eau/air
« Pied « du
lézard
Sens du lézard

5
le « coup de rame » : la force reçue en réaction à sa frappe lui
permettant de rester à la surface, il rame vers l’arrière pour avancer
(mouvement horizontal)
le rétablissement : il sort sa patte de l’eau et la ramène vers l’avant
pour effectuer un nouveau mouvement.
o Il court sur l’eau, et c’est manifestement sa vitesse, donc la vitesse avec
laquelle il frappe l’eau qui lui permet de se maintenir à la surface.
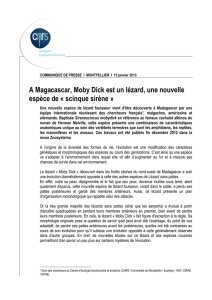
II. Modélisation du lézard
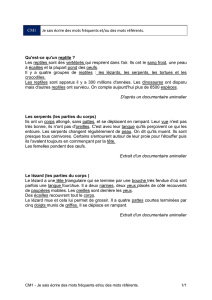
o Protocole
Dans un premier temps, nous avons essayé de reproduire le mouvement
vertical de la patte du lézard sur l’eau, pour pouvoir mesurer une relation
entre la vitesse de la patte et la force que l’eau oppose en retour.
Interface
eau/air
Sens du lézard
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%