Ordonnancement

9
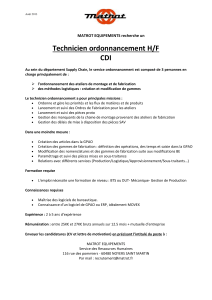
F: fondations
M: murs
E: électricité T: toit
I: peinture intérieure
X: peinture extérieureP: plomberie T: fenêtres
N: nains de jardin

t1, . . . , tnti< tj
i < j
O(nlog n)
2

d
a
b
d
f
h
i
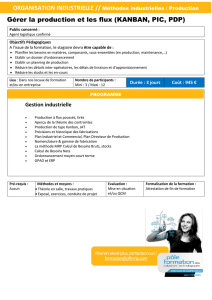
abc
e
g
d
abc
fe
p=∞
t P (t)
∅
P(∅) = −∞
p
P(t)
d:= 1
p
p
d
td,k d k
d:= d+ 1
p= 1 p=∞

td,1=∅
P(td,1)
t > d t
> d t0≤t
P(t0)≤P(td,1)
P(t)≤P(td,1)
d
a
b
P(t) := t
2
P(t) := t
3
P(t)
t P (t) := 0
1,2,

d P (td,2)< P (t)t td,2
td,2=∅td,1< t
P(t0)≥P(td,1)t0< t
T t
td,2T0t0P(t0)≥P(td,1)
d0:= 0 d1, d2, . . .
B0, B1, B2, . . .
Bk:= tdk+1,1, tdk+1,2, . . . , tdk+1 ,1.
B0B1
2
2
2
2
p
3
e
abc
f
d
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%