méthode de Ziegler

eivd R´
egulation automatique
Application de la m´ethode de Ziegler-Nichols :
r´egulation de temp´erature
Table des mati`eres
1 Introduction 2
2 Conditions g´en´erales des mesures 2
3 Imposition autour d’un point de fonctionnement 3
4 Application de la seconde m´ethode de Ziegler-Nichols, version
relais 4
4.1 Proc´edure ............................... 4
M´
ethode de Ziegler-Nichols 1mee \Foehn˙ZN.tex\6 d´ecembre 2001

eivd R´
egulation automatique
1 Introduction
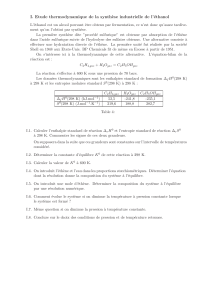
Le travail propos´e a pour but de r´ealiser l’asservissement de temp´erature
de l’air souffl´e par un foehn (figure 1). En commandant un corps de chauffe, on
modifie la puissance chauffant de l’air souffl´e par un ventilateur tournant `a vitesse
constante. La temp´erature est mesur´ee au moyen d’un capteur ad hoc.
La synth`ese du r´egulateur PID analogique s’effectuera par la m´ethode de
Ziegler-Nichols (version du relais).
Se r´ef´erant `a la figure 1, le signal d’entr´ee du syst`eme `a r´egler (tension aux
bornes du corps de chauffe) est la tension au point A, i.e. u(t) = uA(t), alors que le
signal de sortie (temp´erature de l’air) est la tension au point Y, i.e. y(t) = uY(t).
Fig. 1 – Vue du foehn : le signal d’entr´ee est `a appliquer au point A, celui de
sortie est `a mesurer au point B.
2 Conditions g´en´erales des mesures
On veillera `a ce que
1. la sonde de temp´erature soit en position centrale ;
2. l’ouverture d’amen´ee d’air soit α= 30 [◦] ;
M´
ethode de Ziegler-Nichols 2mee \Foehn˙ZN.tex\6 d´ecembre 2001

eivd R´
egulation automatique
3. le commutateur ”heater-heater/wattmeter”, plac´e lat´eralement, soit sur la
position ”heater”.
3 Imposition autour d’un point de fonctionne-
ment
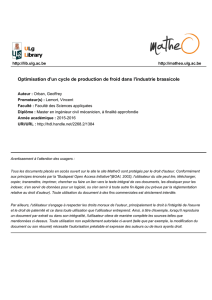
Comme la caract´eristique statique liant la tension de commande du corps
de chauffe u(t) `a la temp´erature mesur´ee y(t) est l´eg`erement non-lin´eaire, il est
n´ecessaire d’effectuer tous les travaux autour d’un point de fonctionnement Q tel
que la temp´erature affich´ee soit de l’ordre de 40 −45 [◦] (figure 2). De ce fait, les
mesures et essais s’effectuent en r´egime de variations ∆u(t)−→ ∆y(t) autour du
point de fonctionnement Q. Cela se fait pratiquement en intercalant une source
de tension uQentre la variation du signal d’entr´ee ∆u(t) et la tension d’entr´ee
u(t) = uA(t).
y=uY
f _ f o e h n _ z n _ 0 1 _ 0 2 . e p s
u = u A
D
u
D
y
Q
uQ
yQ
z o n e l i n é a i r e a u t o u r d e Q
Fig. 2 – Imposition du point de fonctionnement Q par la source de tension externe
uQ.
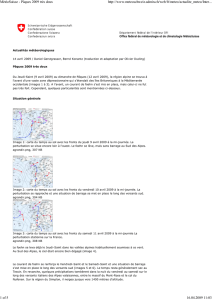
De fa¸con `a ce que du point du vue des mesures, on ne prenne en compte que
la partie due `a la variation ∆u(t), on intercale une seconde source de tension
M´
ethode de Ziegler-Nichols 3mee \Foehn˙ZN.tex\6 d´ecembre 2001

eivd R´
egulation automatique
(boˆıtier ”amplifcateur d’acquisition”) en aval du syst`eme, de fa¸con `a n’obtenir
que la partie ∆y(t) de y(t) = uY(t) due `a ∆u(t) (figure 3). Cette source de tension
est ainsi ajust´ee de fa¸con `a ce que lorsque ∆u(t) = 0 [V], i.e. lorsque le syst`eme
est en son point de fonctionnement Q, ∆y(t) = 0 [V].
S
uQ
Dy ( t )
G
a
( s )
d é c a l a g e d u s i g n a l d ' e n t r é e
( i m p o s i t i o n d u p o i n t d e
f o n c t i o n n e m e n t p a r u n e
a l i m e n t a t i o n e x t e r n e )
s y s t è m e
Du ( t ) S
-
yQ
d é c a l a g e d u
s i g n a l d e s o r t i e
( a m p l i f i c a t e u r
d ' a c q u i s i t i o n )
f_foehn_zn_01_03.eps
v a r i a t i o n d u s i g n a l
d ' e n t r é e
( c r é é e p a r l e P C ,
s o r t i e O U T 0 )
v a r i a t i o n d u s i g n a l
d e s o r t i e
( c r é é e p a r l e Du ( t ) ,
m e s u r é e p a r l e
P C p a r I N 0 )
Fig. 3 – A l’aide de l’amplificateur d’acquisition, on retranche yQde fa¸con `a
mettre en ´evidence ∆y(t), du `a ∆u(t) seul.
4 Application de la seconde m´ethode de Ziegler-
Nichols, version relais
Le logiciel RTPWatch permet de charger une routine effectuant la contre
r´eaction du syst`eme `a r´egler par un relais dont les valeurs limites de sortie sont
±umax. Le nom de la routine est DLL_RT_ziegler_nichols.dll.
4.1 Proc´edure
Apr`es avoir effectu´e le cˆablage, on peut ex´ecuter RTPWatch, choisir dans le
menu Tools l’outil Oscilloscope (Identification et r´egulation sous Windows NT). D`es
lors :
– charger la routine DLL_RT_ziegler_nichols.dll
– s´electionner le signal d’entr´ee du syst`eme `a r´egler (out1 ou in0)
– s´electionner le signal de sortie du syst`eme `a r´egler (in1)
– dans le menu Tools, choisir Varlist et ajuster la limite Ade la commande
d´elivr´ee par le relais `a la valeur souhait´ee (typiquement A= 1 [V]). Il faut
double-cliquez sur le champ contenant la valeur de A, introduire la valeur
et quittancer par la touche ”return”.
– choisir le mode de travail ”r´egulation boucle interne”
M´
ethode de Ziegler-Nichols 4mee \Foehn˙ZN.tex\6 d´ecembre 2001

eivd R´
egulation automatique
D`es ce moment, le syst`eme `a r´egler est contre-r´eactionn´e par un relais, et si
les tensions de d´ecalages sont correctes, (∆u(t)≈0 [V] =⇒∆y(t)≈0 [V])
l’ensemble doit se mettre `a osciller. Il est alors possible d’enregistrer les signaux
et d’appliquer la m´ethode de Ziegler-Nichols (version relais).
M´
ethode de Ziegler-Nichols 5mee \Foehn˙ZN.tex\6 d´ecembre 2001
1
/
5
100%