fonctions de plusieurs variables - MPSI-1

FONCTIONS DE PLUSIEURS VARIABLES
MPSI 1–Lycée Thiers
Année 2008-2009
Table des matières
A L’espace vectoriel normé R22
A.1 Boules ouvertes, boules fermées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
A.2 Parties bornées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
A.3 Parties ouvertes, fermées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
A.3.1 Ouverts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
A.3.2 Fermés................................................. 3
A.4 Point adhérent à une partie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
A.4.1 Point adhérent à une partie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
A.4.2 Caractérisation séquentielle d’un point adhérent . . . . . . . . . . . . . . . . . . . . . . . . . 4
A.4.3 Fermés et points adhérents, caractérisation séquentielle des fermés . . . . . . . . . . . . . . 5
A.5 Théorème de Bolzano Weierstrass . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
B Fonctions de deux variables (réelles), limites, continuité 5
B.1 Fonctions de deux variables réelles à valeurs réelles . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
B.2 Limite, continuité en un un point d’une fonction de deux variables réelles à valeurs réelles . . . . 6
B.2.1 Limite d’une fonction en un point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
B.2.2 Continuité en un point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
B.3 Continuité globale d’une fonction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
B.3.1 Continuité d’une fonction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
B.3.2 Applications continues sur un fermé borné . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
B.3.3 Ouverts ou fermés définis par une application continue . . . . . . . . . . . . . . . . . . . . . 9
B.4 Fonctions à valeurs dans R2, composition et limites . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
B.4.1 Fonctions à valeurs dans R2..................................... 10
B.4.2 Composition, limites, continuité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
B.4.3 Limite et applications partielles, limite ”en suivant un chemin continu” . . . . . . . . . . . 11
C Dérivées partielles premières 12
C.1 Développement limité à l’ordre 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
C.1.1 Développement limité à l’ordre 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
C.1.2 DL1(x0,y0)et dérivées partielles en (x0,y0). . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
C.1.3 Dérivée suivant une direction quelconque . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
C.2 Fonctions de classe C1sur un ouvert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
C.2.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
C.2.2 Théorème fondamental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
C.2.3 Premières propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
C.2.4 Composition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
C.3 Extremum local . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
C.4 Étude locale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
C.4.1 Gradient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
C.4.2 Différentielle en un point, la notation df . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
D Dérivées partielles d’ordre 2 20
D.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
D.2 Fonctions de classe C2sur un ouvert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
D.3 Théorème de Schwarz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20

Mathématiques
chapitre : fonctions de plusieurs variables
page
2
E Exos en vrac 21
A L’espace vectoriel normé R2
C’est le R-espace vectoriel R2muni d’une norme qui nous intéresse ici (note1) : de la norme euclidienne cano-
nique que nous allons noter ici k.k2ou k.k:
∀(x,y)∈R2,k(x,y)k2=px2+y2³=p((x,y)|(x,y))´.
(note2).
A.1 Boules ouvertes, boules fermées
•La présence d’une norme permet de définir les notions de R2analogues aux notions d’intervalles de R(qui
joue un rôle très important dans la rigueur de l’analyse), ce sont les notions de boules ouvertes, boules fermées :
Définition 1 Soient a∈R2et r≥0.
1.
On appelle boule ouverte de centre aet de rayon rla partie de R2:B(a,r) =
©u∈R2/ku−ak2< rª. (Notea).
aB(a,r)est l’ensemble des points du plan qui sont à une distance de astrictement inférieure à r. Lorsque r= 0 :
BN(a,r) = ∅.
Dessin :
2.
On appelle boule fermée de centre aet de rayon rla partie de R2:B(a,r) =
©u∈R2/ku−ak2≤rª. (Notea).
aBN(a,r)est l’ensemble des points du plan qui sont à une distance de ainférieure ou égale à r. Lorsque r= 0 :
B(a,r) = {a}.
Dessin :
3.
On appelle sphère de centre aet de rayon rla partie de R2:S(a,r) = ©u∈R2/ku−ak2=rª.
(Notea).
aS(a,r)est l’ensemble des points du plan qui sont à une distance de aégale à r. Lorsque r= 0 :B(a,r) = {a}.
Dessin :
1. Pour être plus précis c’est la présence d’une distance dans R2, conséquence de la présence d’une norme qui fait marcher le shmilblick :
R2est un espace métrique.
2. Nous verrons en exos que cette norme n’en est qu’une parmi d’autres .

Mathématiques
chapitre : fonctions de plusieurs variables
page
3
A.2 Parties bornées
Définition 2 Une partie Ade R2est dite bornée lorsqu’il existe M∈R+tel que
∀u∈A, kuk ≤ M.
Petit dessin illustratif :
A.3 Parties ouvertes, fermées
A.3.1 Ouverts
•Ce sont en gros des parties qui n’ont pas de bord...
Définition 3 Une partie Ode R2est dite ouverte (Oest un ouvert de R2,) lorsque
∀u∈O,∃ru>0,B (u,ru)⊂O.
Dessin
Exemples ]−1; 1[ ×]0; 1[,B2(0,1),]0; 1[ ×R,R2,∅(convention logique).
Dessins
Exemples 1 1. Une boule ouverte est un ouvert.
A.3.2 Fermés
•Ce sont en gros des parties qui contiennet leur bord...
Définition 4 Une partie Fde R2est dite fermée (Fest un fermé de R2,) lorsque son complé-
mentaire {R2Fest un ouvert de R2.
Dessin illustratif

Mathématiques
chapitre : fonctions de plusieurs variables
page
4
Attention : être fermé n’est pas le contraire d’être ouvert (ne pas être ouvert).
Exemples [−1; 1] ×[0; 1],B∞(0,1),[0; 1] ×R,R2,∅sont fermés. Mais [0; 1] ×]−1; 0[ n’est ni ouvert ni fermé (ce
n’est pas un ouvert et ce n’est pas un fermé pour autant)
Dessins
Exemples 2 1. Une boule fermée est un fermé.
A.4 Point adhérent à une partie
A.4.1 Point adhérent à une partie
•Analogue de point élément ou extrémité. Fondamental : pour tendre vers un point en restant dans le domaine
de définition, on le prendra adhérent à ce domaine.
Définition 5 Soient Aune partie de R2et a∈R2. On dit que aest adhérent à Alorsque
∀ε > 0,B (a,ε)∩A6=∅.
Dessin
Rem1 Si a∈A, alors aest adhérent à A.
Rem2 Si A=∅, aucun point n’est adhérent à A.
Rem2 On note souvent Al’adhérence de A.
A.4.2 Caractérisation séquentielle d’un point adhérent
•Un petit rappel: Avant de continuer, un petit mot nécessaire à propos des suites à valeurs dans R2.En identi-
fiant R2et C, on peut considérer que la notion de suite à valeurs dans R2a déjà été introduite. Les définitions
de suites bornées, suites convergentes, et de limites ont été données à l’aide du module c’est-à-dire de la norme
euclidienne canonique k.k2. On ”rappelle” ainsi que si (un)n∈Nune suite à valeurs dans R2.
–(un)est bornée lorsqu’il existe M∈R+tel que pour tout n∈N,kunk ≤ M.
– Soit l∈R2.(un)converge vers llorsque : ∀ε > 0,∃N∈N,∀n≥N, kun−lk ≤ ε
Proposition 1 Soient A⊂R2,a∈R2.aest adhérent à Assi il existe une suite
d’éléments de Aconvergeant vers a(i.e. il existe (an)∈ANtq an→a).

Mathématiques
chapitre : fonctions de plusieurs variables
page
5
A.4.3 Fermés et points adhérents, caractérisation séquentielle des fermés
Proposition 2 Soit F⊂R2.Fest fermée ssi tout point adhérent à Fest dans Fssi
toute suite d’élements de Fconvergeant (dans R2) converge en fait dans F.
A.5 Théorème de Bolzano Weierstrass
Théorème 1 De toute suite bornée de R2on peut extraire une suite convergente.
B Fonctions de deux variables (réelles), limites, continuité
•On s’intéresse essentiellement aux fonctions à valeurs réelles ; on cause un peu des fonctions à valeurs dans
R2, en particulier pour nous permettre de composer des fonctions.
B.1 Fonctions de deux variables réelles à valeurs réelles
•Ce sont des applications f:A→Roù Aest une partie non vide de R2.
Exemples 3
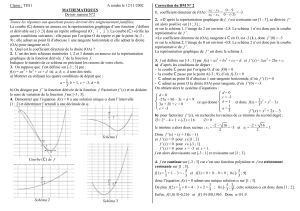
f: (R+×R+)→R,x7→√xy. On peut représenter graphiquement une telle fonction dans l’espace muni d’un
repère (O,i,j,k)orthonormal par une nappe, une surface : z=f(x,y),(x,y)∈A.
0
1
2
3
4x
0
1
2
3y
0
1
2
3
4
FIG. 1 – Une jolie nappe
Remarque 1
L’ensemble F(A,R)des fonctions définies sur Aet à valeurs dans Rest un R-espace vectoriel et un anneau
commutatif pour les lois usuelles f+g,λf et fg provenant de celles de R.
F(A,R)est muni d’une relation d’ordre partielle f≤gssi pour tout (x,y)∈A,f(x,y)≤g(x,y).
Pour toute la partie II, on se donne une partie Anon vide de R2et f:A→R.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
1
/
23
100%