Dossier ressources - Lycée Alfred mongy

EXAMEN : CGM Maintenance des véhicules automobiles - Option : Voitures particulières
Dossier ressources
Epreuve : Diagnostic-Intervention
Session 2015
Repère: UE
Durée : 6 h
Épreuve d’admissibilité
Page : 1/20
Session 201 5
DOSSIER RESSOURCES
CONCOURS GÉNÉRAL DES MÉTIERS
Maintenance des véhicules automobiles
Option : véhicules particuliers
Épreuve Écrite
Épreuve d’admissibilité
DIAGNOSTIC-INTERVENTION
Durée : 6h
Dossier ressources paginé de 1/20 à 20/20
Conseils aux candidats :
Il est demandé aux candidats de consulter attentivement le dossier ressources pour instruire les
réponses aux questions posées.
Matériels et documents autorisés :
Calculatrice électronique, autonome, non imprimante, à entrée unique par clavier
à l'exclusion de tout autre matériel électronique
Les candidats doivent rendre l'intégralité des documents à l'issue de la composition

EXAMEN : CGM Maintenance des véhicules automobiles - Option : Voitures particulières
Dossier ressources
Epreuve : Diagnostic-Intervention
Session 2015
Repère: UE
Durée : 6 h
Épreuve d’admissibilité
Page : 2/20
Problématique de diagnostic sur une direction
électrique à assistance variable
1. Présentation
Le Véhicule DS3 de la marque Citroën est équipé d'une direction assistée électrique
continûment variable en fonction de la vitesse. Appliquée sur les véhicules du groupe PSA
Peugeot Citroën, cette direction apporte de nombreux avantages :
Un fort agrément de conduite aussi bien en ville que sur route. La gestion électronique
des données (Vitesse du véhicule, angle de volant) permet un paramétrage extrêmement
fin des lois de direction.
Une réduction non négligeable de la consommation en carburant d'environ 0,2 litres aux
100 km obtenue par la suppression de la pompe d'assistance.
La suppression des fluides hydrauliques, de la pompe d'assistance et des canalisations
réduit la masse globale de la direction. L'absence de pompe d'assistance participe
également à la limitation des bruits parasites lors de braquages importants.
La direction, de type pignon-crémaillère intègre un moteur électrique de 60 ou 65 A qui agit
directement sur le pignon de direction. Des capteurs mesurent des paramètres tels que l'angle
volant ou la vitesse du véhicule. Ces informations sont transmises à un calculateur qui
évalue en temps réel l'assistance optimale à délivrer par le moteur électrique.
La colonne de direction se règle en hauteur et en profondeur sur une course de 40 mm. Elle se
rétracte sur une longueur de 50 mm en cas de choc par le glissement de deux tubes cannelés,
afin de limiter les effets d'une collision "volant/thorax".
A la différence d'une direction assistée hydraulique, l'énergie est consommée seulement en cas
de besoin (lors d'une action du conducteur sur le volant).
On réalise donc une diminution de la consommation par rapport à une direction hydraulique.
Il n'y a pas d'interaction directe avec le moteur thermique car la direction assistée électrique
utilise le courant de l'alternateur (lorsque le moteur thermique tourne).
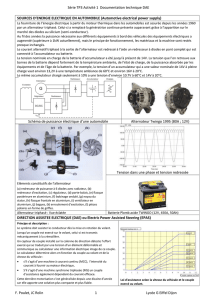
Implantation des éléments
(1) Ensemble direction assistée électrique.
(2) Moteur électrique d’assistance de direction.
(3) Capteur de couple.
(4) Volant de direction.

EXAMEN : CGM Maintenance des véhicules automobiles - Option : Voitures particulières
Dossier ressources
Epreuve : Diagnostic-Intervention
Session 2015
Repère: UE
Durée : 6 h
Épreuve d’admissibilité
Page : 3/20
1.2. Principe de fonctionnement
La direction assistée de type électrique assiste les efforts de manœuvre dès la sollicitation du
volant.
Le couple d'assistance est fourni à l'aide d'un moteur électrique. Ce couple est transmis
au pignon de la crémaillère par un réducteur (roue + vis sans fin de rapport 1:15). Il
s'additionne au couple volant appliqué par le conducteur.
La force exercée par le conducteur sur le volant est transmise mécaniquement à la
crémaillère via le pignon. Ce couple conducteur est mesuré par l'intermédiaire du capteur
de couple et envoyé au calculateur de direction assistée.
Le calculateur alimente le moteur en fonction :
du couple volant ;
de la vitesse du véhicule.
Vitesse du
véhicule
Niveau
d'assistance
Observations
Vitesse nulle
ou inférieure à 7
km/h
(Parking,
manœuvre)
Maximum
Le calculateur commande le moteur d'assistance uniquement en
fonction du capteur de couple
Vitesse
moyenne
de 8 km/h à 152
km/h
Variable
Le calculateur commande le moteur d'assistance en fonction du
capteur de couple et de la vitesse véhicule.
L'assistance est d'autant plus faible que la vitesse véhicule est
élevée.
Vitesse
supérieure
à 152 km/h
Faible
Le calculateur commande le moteur d'assistance uniquement en
fonction du capteur de couple.
On dit que l'assistance est constante sur cette plage de vitesses.

EXAMEN : CGM Maintenance des véhicules automobiles - Option : Voitures particulières
Dossier ressources
Epreuve : Diagnostic-Intervention
Session 2015
Repère: UE
Durée : 6 h
Épreuve d’admissibilité
Page : 4/20
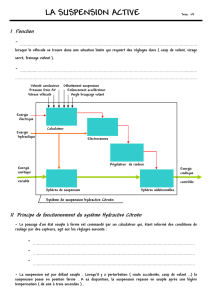
1.3. Ensemble direction assistée électrique
Le système de direction assistée électrique est composé d'une direction manuelle classique,
dont le rapport de démultiplication pignon-crémaillère est de 17,8/1 ; avec en plus :
un capteur de couple ;
un moteur électrique d'assistance et son réducteur ;
deux faisceaux (un faisceau signal et un faisceau puissance) ;
d'un calculateur branché sur le réseau CAN (non présenté sur ce dessin).
Repère
Désignation
1
Capteur de couple
3
Connecteur alimentation moteur
d'assistance
2
Moteur d'assistance
4
Connecteur signal du capteur de couple
Caractéristiques générales de la direction :
Rapport de démultiplication
17,8/1 (tour volant / tour de roue)
Nombre de tour volant (de butée à butée)
2,82 tours
2. Les éléments constitutifs
2.1. Capteur de couple

EXAMEN : CGM Maintenance des véhicules automobiles - Option : Voitures particulières
Dossier ressources
Epreuve : Diagnostic-Intervention
Session 2015
Repère: UE
Durée : 6 h
Épreuve d’admissibilité
Page : 5/20
2.1.1. Rôle
Il permet de mesurer en permanence le couple que le conducteur applique au volant
et détermine le sens de rotation du volant et le couple exercé par le conducteur.
Nota : Un étage électronique intégré au calculateur empêche l'apparition d'un couple
d'assistance dans un sens opposé au sens de rotation du volant et interdit l'apparition
d'assistance lorsqu'il n'y a pas de sollicitation au volant.
Cette direction n'utilise pas de capteur d'angle volant.
2.1.2. Implantation
Le capteur de couple est inséré sur l'axe du pignon entre l'arbre d'entrée (côté colonne et
volant) et l'arbre de sortie (côté pignon de crémaillère).
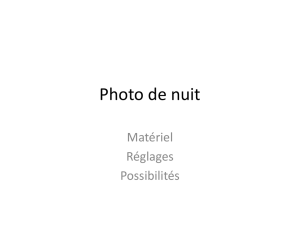
2.1.3. Description du capteur de couple (en position repos)
Repère
Désignation
Repère
Désignation
A
Côté pignon de crémaillère
B
Côté volant de direction
1
Bobine de mesure fixe par rapport à la
direction
2
Bobine de référence fixe par rapport à la
direction
3
Arbre d'entrée côté colonne (volant)
4
Barre de torsion qui relie l'arbre d'entrée et
l'arbre de sortie permettant un
déplacement relatif entre les deux arbres
de ± 4,5° maximum
5
Bague de détection solidaire de l'arbre
d'entrée
6
Bague de détection solidaire de l'arbre
d'entrée
7
Bague de détection solidaire de l'arbre
de sortie
8
Arbre de sortie côté pignon de crémaillère
Ce capteur est un couple-mètre à mesure d'angle de torsion à courant de Foucault.
Chaque bague de détection possède une série de créneaux disposés sur sa périphérie de
telle manière, qu'en cas de torsion, les créneaux se décalent l'un par rapport à l'autre.
Ce décalage plus ou moins important des créneaux en vis à vis a pour effet de modifier
l'inductance des deux bobines haute fréquence.
L'électronique de traitement des signaux est placée à proximité des bobines.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%