la suspension active

LA SUSPENSION ACTIVE Susp. 1/8
I Fonction
-
lorsque le véhicule se trouve dans une situation limite qui requiert des réglages durs ( coup de volant, virage
serré, freinage violent ).
-
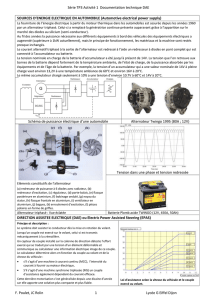
II Principe de fonctionnement du système Hydractive Citroën
- Le passage d'un état souple à ferme est commandé par un calculateur qui, étant informé des conditions de
roulage par des capteurs, agit sur les réglages suivants :
-
-
-
- La suspension est par défaut souple . Lorsqu'il y a perturbation ( route accidentée, coup de volant ...) la
suspension passe en position ferme . A sa disparition, la suspension repasse en souple après une légère
temporisation ( de une à trois secondes ) .
Volonté conducteur Débattement suspension
Pression frein AV Enfoncement accélérateur
Vitesse véhicule Angle braquage volant
Energie
électrique
Energie
hydraulique
Energie
cinétique
variable
Energie
cinétique
contrôlée
Calculateur
Electrovannes
Régulateur de raideur
Sphères additionnelles
Sphères de suspension
Système de suspension hydractive Citroën

Susp. 2/8
2.1 Passage en ferme par anticipation
- La suspension sera durcie avant que le véhicule n’ait bougé .
2.2 Passage en ferme par réaction
- Le calculateur commandera le passage en ferme en fonction des réactions du véhicule .
III Principe de fonctionnement
- Le système possède deux états de raideur pour la suspension et l’anti-roulis, plus deux états
d'amortissement .
-
-
- Paramètres pris en compte pour le passage en ferme :
•
•
•
•
Evénement Valeur mesurée Capteur
Virage Volant
Coup de volant Volant
Demande de puissance
ou frein moteur
Freinage Frein
Evénement Valeur mesurée Capteur
Variations de hauteur
Accélération ou
Décélération

Susp. 3/8
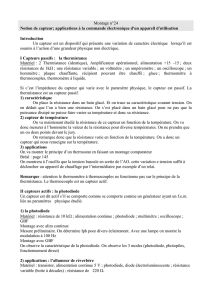
IV Schéma synoptique électro-hydraulique
- Le calculateur informé par différents capteurs commande les électrovannes de régulateurs de raideurs
( modifiant ainsi la suspension , l'amortissement et l'anti-roulis ) .
- La commande régulant la hauteur de caisse s’effectue mécaniquement ( par les correcteurs ) .

Susp. 4/8
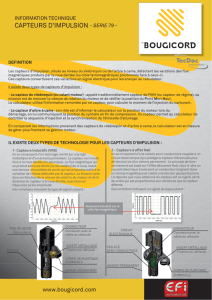
V Capteur de Vitesse Véhicule à effet Hall
- Il fournit un signal électrique proportionnel à la vitesse de
rotation du secondaire B.V. , donc à la vitesse du véhicule .
- Il est monté sur la prise tachymétrique de la boîte de vitesses .
- Ce capteur est un générateur d'impulsions à
effet Hall .
-
- La roue polaire fait passer successivement un pôle nord, un pôle sud, un pôle nord ...
- Le courant délivré par la plaquette apparaît .
- Un circuit intégré amplifie le signal carré et le délivre au calculateur .
- Chaque fois que le véhicule parcourt 20 cm, la tension passe à sa valeur maximum ( top ) :
. 50 tops par seconde ⇒ km/h . 100 tops par seconde ⇒ km/h
1 4
2 5
3
20 cm

Susp. 5/8
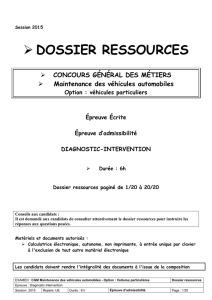
VI Capteur Volant de Direction
6.1 Composition
- Il s'agit d'un capteur optoélectronique double .
- Le capteur est fixe et la roue phonique tourne avec le volant .
6.2 La photodiode
-
-
6.3 Principe de fonctionnement du capteur optoélectronique
- Une photodiode (P) face à une source lumineuse (L) séparées par une roue phonique possédant des fenêtres .
1 - Capteur optoélectronique double
2
-
3
-
4 - Roue phonique
Signal carré sortie photodiode (P)
Rotation
de la roue
Rotation
de la roue
Tensions
9,5 V
Etats
1
0
Les deux signaux
( + ) alimentation 5 volts
( - ) masse
état état
 6
7
8
6
7
8
1
/
8
100%