Antenna Rotator System

Antenna Rotator System
Fonctionnement & matériel
Manuel de Référence
Juin/2002 Rev 2.1c
Introduction
Merci d’avoir acheté l’interface ARS
ARS est la plus puissante, la plus performante et la moins chère des interfaces
moteurs universelles disponible dans le monde aujourd’hui. Elle peut-être connectée
à n’importe quel moteur, elle supporte trois résolutions de convertisseurs analogique
numérique différentes : 8, 10 et 12 bits.
Elle travaille avec n’importe quel « moteur d’azimut » ou «moteur d’azimut et
d’élévation », et beaucoup de programmes sont compatibles.
Elle pourra transformer votre moteur en un moteur de dernière technologie.
Il est très important que vous lisiez le manuel attentivement car vous pouvez
endommager votre moteur ou le circuit RCI à cause d’un mauvais câblage.
Rappelez-vous que le temps passé à lire le manuel peut vous permettre de gagner
du temps ou de l’argent qui serait perdu en cas de mauvaise installation. Si vous
n’êtes pas sur de vous sur la façon de procéder ou si vous avez des questions après
la lecture du manuel, vous pouvez contacter EA4TX.
L’ARS a été développée pour opérer avec le plus de moteurs disponibles sur le
marché. Si votre moteur n’est pas inclus dans la liste des moteurs compatibles vous
pouvez consulter EA4TX pour comparer les différences. De toute façon vous
pouvez être sur qu’il ni aura pas de changement à faire sur le circuit RCI.
La carte RCI sur un port parallèle libre de votre ordinateur. Un ordinateur peut
supporter 4 ports parallèles simultanément, donc si vous voulez utiliser en même
temps une imprimante et la carte RCI vous pouvez en installer un autre pour moins
de $10. La carte n’utilise aucun IRQ donc vous pouvez mettre hors service l’IRQ du
port parallèle où la carte RCI est connectée. Vous pouvez aussi utiliser un
interrupteur manuel pour le port, autrement un seul port peut-être utiliser pour les 2.
Vous trouverez dans le cd-rom plusieurs versions du logiciel ARS.
ARS pour DOS.
ARSWIN pour Windows9x, Windows NT, 2000 & XP.

Le manuel
Le manuel est divisé en 3 parties : Le fonctionnement de la carte RCI, Le
fonctionnement de la carte RCI-EL et un guide d’installation. Des annexes sont aussi
disponibles.(Le guide d’installation n’est pas traduit )
Partie 1: Installation du circuit RCI, description du câblage avec le moteur.
Normalement l’interface est mise entre l’unité de control et les câbles attachés au
moteur. Dans certains cas la carte RCI peut être installée dans l’unité de control du
moteur s’il y a assez de place, mais il est recommandé de faire le control et les
réglages à l’extérieur de l’unité. On doit fournir à l’interface une alimentation 12-
14VDC.
Partie 2: Installation du circuit RCI-EL, description de l’installation de la carte RCI-EL
optionnelle. Vous devez lire ce chapitre seulement si vous avez acheté ce modèle.
Dans les annexes vous trouverez les spécifications et des questions pour dépanner.
Lisez s’il vous plait attentivement avant d’installer la carte. Cela ne sert à rien de se
sentir frustré. Si vous avez des questions contactez EA4TX
Adresse:
Pablo García - EA4TX
Fresno 67
28529 Rivas
Madrid - SPAIN
E-mail:
Site Internet:
http://www.ea4tx.com

Part 1
Installation du circuit RCI.
Le circuit RCI facilite les objectifs suivants:
Lire la position en temps réels de l’antenne grâce à un convertisseur
analogique/numérique
Contrôler le mouvement des moteurs (droite ou gauche) grâce à des relais.
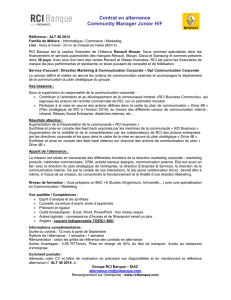
La carte RCI a les connecteurs suivants :
J1: Ce connecteur contrôle la rotation de l’antenne. Il est attaché aux 3 relais. Un des
relais (AUX) est nécessaire seulement si on utilise le contrôle de la vitesse et un
frein.
J2: Ce connecteur sert pour l’alimentation (12-14 VDC).
J3: Entrée du convertisseur analogique/numérique pour le moteur d’azimut. Cette
entrée est utilisée pour lire la position de l’antenne. Ce connecteur doit être en
parallèle avec les fils attachés au potentiomètre du moteur qui permettent de lire la
position de l’antenne.
J4: Entrée du convertisseur analogique/numérique pour le moteur d’élévation.
DB-25: Connecteur DB25 femelle relié au port parallèle de l’ordinateur
Le dessin ci-dessous permet de repérer facilement la position des différents
connecteurs de la carte RCI:

1.1 Connecteur J1: Connections des relais
La carte RCI à 2 relais pour contrôler la rotation: droite (CW) et gauche
(CCW). Un relais optionnel contrôle le frein pour les moteurs qui en ont besoin ou le
control de la vitesse pour ceux dont l’unité de control supporte cette option.
Ces relais ont deux positions et 2 circuits.
Chaque circuit supporte 5A à 220V.
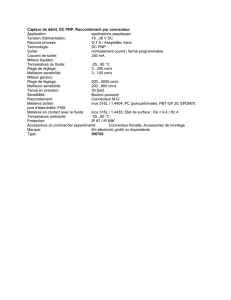
Un des deux circuits de chaque relais est toujours câble et attaché au connecteur en
accord avec le dessin suivant :
Tout au long de ce manuel les 9 terminaux de ce connecteur seront référencés de la
façon suivante :
J1-1, J1-2, J1-3, J1-4, J1-5, J1-6, J1-7, J1-8 et J1-9.
En position désactivée, J1-2 commute avec J1-1. Quand il est activé, J1-2 commute
avec J1-3.
En position désactivée, J1-5 commute avec J1-4. Quand il est activé, J1-5 commute
avec J1-6.
En position désactivée, J1-8 commute avec J1-7. Quand il est activé, J1-8 commute
avec J1-9.
Le premier circuit de chaque relais (accessible en J1) doit être utiliser pour le
contrôle de la rotation vers la droite et la gauche. Si c’est nécessaire, le second
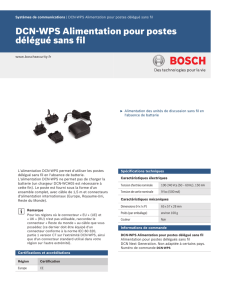
circuit des relais peut activer un deuxième circuit du moteur. Les connections pour le
deuxième circuit des relais sont imprimés sur la carte, à coté des relais, avec les
références suivantes
A B C D E F G H I

En position désactivées les connections, similaires à J1, sont les suivantes :
B to A
E to D
H to G
Quand c’est activé les connections sont les suivantes:
B to C
E to F
H to I
Il y a plusieurs procédure pour connecter J1 à l’unité de control. Dans la partie 3 vous
trouverez des explications détaillées sur l’installation de la carte sur différents
modèles de moteur. Voici la procédure générale :
??Depuis le câble qui relie le moteur à l’unité de contrôle, localisez le fil
qui commande la rotation à droite et enlevez le (depuis l’unité de
control).
??Attachez-le à J1-2, Connectez J1-1 à l’endroit ou vous avez enlevé le
fil. Dans ce cas, quand le relais est désactivé, J1-2 est connecté à J1-1,
permettant une opération normale de l’unité de contrôle.
??La même opération doit être faite avec le fil qui fait la rotation à gauche.
Enlevez-le de l’unité de contrôle et attaché-le à J1-8
??Connectez J1-7 sur l’unité de control ou vous venez enlever le fil.
??Vous devez attacher J1-3 et J1-9 sur la tension fourni par l’unité de
control quand elle est en marche. Donc, ouvrez l’unité de contrôle. Et
avec l’aide du diagramme du circuit et un voltmètre, localisez la tension
qui entraîne la rotation. Normalement c’est aux alentours de 24V.
C’est l’opération la plus délicate de l’installation et vous devez le faire avec beaucoup
d’attention. Si votre moteur est présent dans la partie 3, vérifier toutes les
connections indiqués. En cas de doute ou pour n’importe quelles modifications
spéciales ou pour de l’aide si c’est nécessaire, contactez EA4TX
??Rappelez-vous que si votre moteur un double circuit a connecté, vous
devez faire les mêmes opérations en utilisant le second circuit de la
RCI, grâce aux points marqués : A B C D E F G H I.
Si votre moteur est équipé d’un système de frein vous devez activer le
système grâce au relais AUX qui est connecté à J1-4, J1-5 et J1-6.
Normalement les 2 fils connectés à l’interrupteur de frein doivent être
connectés en parallèle avec J1-5 et J1-6.
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%