2.5 Commande en position d`un robot

2.5 Commande en position d’un robot 75
2.5 Commande en position d’un robot
2.5.1 Introduction
En robotique, une des taches de base que doit accomplir un robot consiste à se
déplacer d’un point Aà un point B, avec le respect éventuel d’un certain nombre
de contraintes (vitesse, accéleration max, évitement d’obstacle). La commande en
position du robot consiste donc à calculer les différentes consignes, en fonction du
temps, afin de générer le mouvement désiré. C’est pour cela que la commande en
position d’un robot est aussi appelée génération de mouvement.
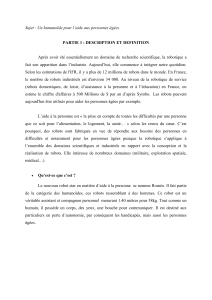
De manière classique, deux types de commande en position sont envisagée :
– une commande en position dans l’espace articulaire q(fig 2.12a). Pour assurer
le passage de la position initiale à la position finale (qi→qf) et le controler
temporellement, une génération de mouvement est nécessaire. Par exemple, si
l’on souhaite synchroniser les axes pour avoir un mouvement harmonieux et
controler la géométrie du déplacement du robot à chaque itération.
– une commande en position dans l’espace opérationnel X(fig 2.12b).
+-
+-
qf
qd(t)
qd(t)
qi
qi
qm
qm
T
T
Génération d’un
Génération d’un
mouvement en
mouvement en
q
Asservissement
Asservissement
MGI
MGD
XfXd(t)
Xi
X
(a)
(b)
Fig. 2.12 – Boucles de génération de mouvement. (a) : dans l’espace articulaire -
(b) : dans l’espace opérationnel.
.
Le choix du type de commande peut être effectué en fonction de l’espace dans lequel
est décrit la trajectoire à suivre. La génération d’un mouvement directement dans
l’espace articulaire présente des avantages :
– le mouvement est minimal sur chaque articulation,
– elle nécessite moins de calculs (pas de passage MGD MGI),

76
Modélisation géométrique des robots - Commande en position des
robots
– le mouvement n’est pas affecté pas le passage sur les configurations singulières,
– les contraintes de couples maximum et de vitesse maximum sont connues car
on les fixe aux limites physiques des actionneurs.
En contrepartie, la géométrie du déplacement du robot dans l’espace opération-
nel n’est pas controlée (bien qu’elle soit répétitive). Il y a donc risque de collision si
l’environnement est encombré. On en déduit que ce type de mouvement conviendra
d’avantage lorsque l’espace sera dégagé, et pour des déplacements rapides.
Lorsque la géométrie de la trajectoire doit être contrôlée, la génération de trajec-
toire dans l’espace opérationnel sera préférée. Par contre, elle comporte un certain
nombre d’inconvénients :
– elle demande d’appliquer le MGI en chaque point de la trajectoire,
– elle peut être mise en défaut lorsque la trajectoire calculée passe par une
position singulière,
– elle peut être mise en défaut lorsque la trajectoire calculée fait passer une
articulation hors de ces limites de variation q¬[qmin;qmax],
– les limites Cmax,Vmax étant définies dans l’espace opérationnel ne permettent
pas d’utiliser au mieux les actionneurs.
Le choix dépend essentiellement de la tâche à effectuer et de l’espace de travail.
espace articulaire espace opérationnel
rapide “moyennement” rapide
tâche espace de travail libre espace de travail encombré
(vitesses, couples, butées) (précision, obstacle)
2.5.2 Génération de mouvement dans l’espace articulaire
Soit un robot à ndegrés de liberté.
Soit qile vecteur des coordonnées articulaires initiales.
Soit qfle vecteur des coordonnées articulaires finales.
Soit kvle vecteur vitesse maximal.
Soit kale vecteur accélération maximal.
Les caractéristiques kv,kasont calculées en fonction de :
–kv: les caractéristiques des actionneurs et des rapports de réduction des or-
ganes de transmission,
–ka: le rapport des couples moteurs maximaux aux inerties maximales.
Le mouvement interpolé entre qiet qfen fonction du temps test décrit par

2.5 Commande en position d’un robot 77
l’équation suivante :
q=qi+r(t)Dpour 0≤t≤tf
.
q(t) = .
r(t)D(2.146)
avec D=qf−qi.
r(t)est une fonction d’interpolation telle que : r(0) = 0 et r(tf) = 1. On peut
alors écrire 2.146 comme suit :
q(t) = qf(t)−[1 −r(t)]D(2.147)
Plusieurs fonctions permettent de satisfaire le passage par qiàt= 0 et qfà
t=tf:
– interpolation polynomiale linéaire, de degré 3 ou de degré 5
– loi du Bang Bang,
– loi trapèze (Bang Bang avec paliers de vitesse)
2.5.2.1 Interpolation polynomiale
Les 3 modes les plus courant sont l’interpolation linéaire, l’interpolation de degré
3 et l’interpolation de degré 5.
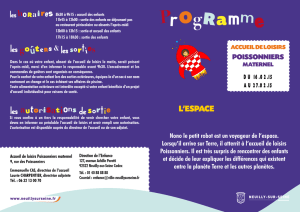
L’interpolation linéaire C’est la plus simple. L’équation du mouvement s’écrit :
q(t) = qi+t
tf.D (2.148)
Cette loi de mouvement impose une vitesse constante le long de la trajectoire. Elle
est continue en position et discontinue en vitesse.
On en déduit la fonction d’interpolation :
r(t) = t
tf
(2.149)
La loi est continue en position, mais discontinue en vitesse et accélération. On
obtient l’évolution suivante (fig 2.13).
Pratiquement, le début (t= 0) et la fin (t=tf)sont marqués par des à-coups.

78
Modélisation géométrique des robots - Commande en position des
robots
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.5
1
1.5
2
2.5
3Evolution de la variable q(t)
t (secondes)
q(t)
qf
qi
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
3Evolution de la variable dq/dt
t (secondes)
dq/dt
Vmax
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
−3
−2
−1
0
1
2
3Evolution de la variable d/dt(dq/dt)
t (secondes)
d/dt(dq/dt)
Fig. 2.13 – Degré 1 : Evolution de la position, de la vitesse et de l’accélération
.

2.5 Commande en position d’un robot 79
L’interpolation de degré 3 [Craig86] Si l’on impose une vitesse nulle aux points
de départ et d’arrivée, on rajoute deux contraintes supplémentaires par rapport à
l’interpolation linéaire. Afin de satisfaire ces 4contraintes,
½˙qi= ˙q(0) = 0 (a)
˙qf= ˙q(tf) = 0 (b)½q(0) = qi(c)
q(tf) = qf(d)
le degré minimal du polynôme est de 3. La forme générale est donnée par l’équa-
tion suivante :
q(t) = a0+a1.t +a2.t2+a3.t3(2.150)
On en déduit les relations donnant la vitesse et l’accélération :
½˙q=a1+ 2.a2.t + 3.a3.t2
¨q= 2.a2+ 6.a3.t (2.151)
En utilisant les hypothèses (a)et (c), on en déduit les coefficients :
½a0=qi
a1= 0 (2.152)
On en déduit la fonction d’interpolation :
r(t) = 3.µt
tf¶2
−2.µt
tf¶3
(2.153)
En utilisant les hypothèses (b)et (d), on obtient un système de deux équations
et deux inconnues. On en déduit les coefficients :
(a2=3
t2
f.D
a3=−2
t3
f.D (2.154)
L’accélération s’annule lorsque t=−2.a2
6.a3=2.3.t3
f
t2
f.6.2=tf
2. Elle a donc un maximum
en t= 0 et minimum en t=tf. La valeur extrèmale est : ¨qmax =6.|D|
t2
f
La vitesse est maximale en t=tf
2et nulle en t= 0 et en t=tf. La valeur
extrèmale est : ˙qmax =3.|D|
2.tf.
On obtient l’évolution suivante (fig 2.14).
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
1
/
23
100%