Exercice 1 : Modélisation d`un moteur à courant continu - e

2
ème
Master : Electrotechnique industrielle TD1 Entrainement Electrique
TD1 Entrainement Electrique
2012/2013
Mr : Taibi Djamel/ novembre 2012
Université Kasdi Merbah Ouargla
Faculté des sciences et technologies et sciences de la matière
Département de génie électrique
2
ème
Master : Electrotechnique industrielle Matière : Entrainement électrique
Exercice 1 : Modélisation d’un moteur à courant continu
La machine à courant continu sera supposée parfaitement compensée, à excitation indépendante et constante. Le
bobinage d’induit est de résistance constante notée Ra, son inductance étant négligée. La force électromotrice sera
notée E et le coefficient de vitesse k : E = k . Ω. Le couple moteur est noté ,Ce et le courant d’induit Ia, le couple
de charge Cr étant négligé.
Afin de maintenir la vitesse du moteur, il est nécessaire d’asservir la vitesse réelle, toujours notée Ω, à une
consigne, notée Ω
e
. Pour cela, on utilise un capteur de vitesse délivrant une tension « image » de la vitesse suivant
la relation : V
T
= k
T.
*Ω. On construit également une tension de référence, notée V
e
, « image » de cette vitesse Ω
e
,
par une loi de même coefficient : V
e
= k
T.
*Ω
e
. On asservit alors la tension de sortie V
T
à la tension d’entrée V
e
.
La machine est pilotée par un hacheur dont la tension de sortie, c’est à dire la tension Ua aux bornes de l’induit du
moteur, est proportionnelle à une tension de commande V : Ua = A*V
1 . Ecrire le système de deux équations auxquelles satisfont les variables Ω et Ia. Ces équations feront également
apparaître la tension d’induit Ua qui est la grandeur de commande et les différents paramètres J, fr, Ra et k.
2 . En déduire la fonction de transfert M(p) reliant les transformées de Laplace de la tension Ua, notée Ua(p), et de
la vitesse Ω, notée Ω(p) : M(p) = Ω(p) / Ua(p).
3 . Déterminer l’expression de la constante de temps τ
m
caractéristique de cette fonction de transfert. Quelle est son
origine ?
4 . Dessiner le schéma-bloc de cet asservissement ayant pour entrée de consigne la tension de référence Ve et
comme sortie la tension V
T.
5 . Déterminer la fonction de transfert en boucle ouverte T(p) de ce système, mise
sous la forme : () =
On exprimera T
0
et τ en fonction des différents paramètres. Expérimentalement, on
mesure T
0
= 1,25 et = 0 , 0 1 s. On rappelle que, par définition, l’ erreur représente la différence entre l’entrée et la
sortie du système bouclé (retour unitaire).
6 . Déterminer la fonction de transfert en boucle fermée, notée H(p), mise sous la forme : () =
. On
donnera les expressions du gain statique H
0
en boucle fermée ainsi que la constante de temps en boucle fermée τ
F
.
Effectuer l’application numérique.
7 . Calculer numériquement l’erreur statique ε
0
(mesurée en régime permanent) du système bouclé lors d’un
échelon de tension d’amplitude V
0
= 10 V.

2
ème
Master : Electrotechnique industrielle TD1 Entrainement Electrique
TD1 Entrainement Electrique
2012/2013
Mr : Taibi Djamel/ novembre 2012
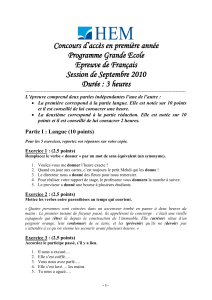
Exercice 2 : Commande linéaire D’un MCC
La figure ci-dessous représente le schéma fonctionnel d’un moteur à courant continu à flux constant. Les grandeurs
entrées et sortie sont données dans les notations usuelles.
1. Spécifier les valeurs des paramètres du moteur (Résistance Ra, l’inductance La, moment d’inertie J,
coefficient de frottement fr, la constante K).
2. Ecrire l’équation opérationnelle Ω=Ω(Ua, Cr). En déduire la relation Ia=Ia(Ua,Cr).
Pour être commandé en vitesse variable, le moteur est alimenté par un convertisseur modélisé par
=
.
Dans la suite de l’exercice on supposera Cr=0. Les spécifications de la nature de commande impose à utiliser (sans
filtrage des rétroactions).
3- un régulateur de courant du type intégral Ci(p)= Ki/p dont on demande de déterminer son gain afin d’avoir un
réglage à amortissement unitaire. Préciser l’erreur statique enregistrée.
4-Un régulateur de vitesse du type
() =
(filtre à retarde de phase) telle que la constante τ est
introduire pour compenser pôle dominant de la FTBF de courant. Déterminer ce régulateur pour réaliser une
dynamique de vitesse à amortissement unitaire.
Ω
1
+
-
Cr
+
-
Ua
MCC
1
/
2
100%