Rotation

&
III. Mouvement de rotation
&
III.1
Table des matières
1. Approche intuitive.................................................................................................................2
2. D'abord un peu de math.........................................................................................................4
2.1 Variables angulaires........................................................................................................4
2.2 Moment de force et produit vectoriel..............................................................................6
3. Equation de Newton pour le mouvement de rotation............................................................8
3.1 ... selon la direction tangentielle......................................................................................8
3.2 ... selon la direction radiale (ou centripète).....................................................................9
4. Statique des forces...............................................................................................................10
4.1 Equilibre de translation .................................................................................................10
4.2 Equilibre de rotation......................................................................................................11
4.3 Centre de gravité, centre de masse................................................................................11
4.4 Je résous un problème de statique.................................................................................13
4.4.1 je fais un croquis... .................................................................................................13
4.4.2 je choisis un système d'axes de référence... ...........................................................14
4.4.3 j'écris les conditions d'équilibre... ..........................................................................14
4.4.4 je résous le système d'équations algébriques... ......................................................14
5. Et pour résumer...................................................................................................................15
6. Et pour compléter: force centripète et pseudo-force centrifuge..........................................16
Stéphane Swillens - édition 2009

&
III. Mouvement de rotation
&
III.2
1. Approche intuitive
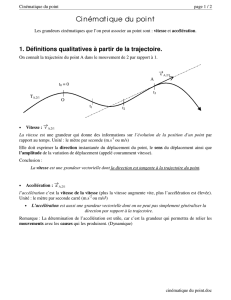
Je suis dans une navette spatiale en "état d'apesanteur". Dans la cabine, une bille flotte
librement tout en se déplaçant devant moi. Tant que la bille n'est soumise à aucune force, sa
vitesse reste constante (1ère loi de Newton!). Je lui donne une chiquenaude dans la direction
et le sens de sa trajectoire initiale. La bille subit donc pendant une fraction de seconde ∆t une
force dans cette direction, et l'accélération qui en résulte engendre une augmentation de sa
vitesse. Je me rappelle que, par définition,
tav
∆
=
∆
r
r
1.1
et donc, la vitesse après la chiquenaude vaut
ta
avant
v
après
v
∆
+
=
r
r
r 1.2
Le mouvement se fait à une dimension (voir fig III.1a). Dès lors, la grandeur de la vitesse
vaut
ta
avant
v
après
v
∆
+
=
1.3
&
Une force appliquée dans la direction du mouvement modifie la grandeur de la vitesse
sans en modifier la direction.
&
av
avant
a∆t
v
après
F
bv
avant
a∆t
v
après
F
cv
avant
a∆t
v
après
F
fig III.1
Stéphane Swillens - édition 2009

&
III. Mouvement de rotation
&
III.3
Je recommence ma manip, mais cette fois en appliquant la chiquenaude obliquement par
rapport à la trajectoire initiale. Je vois que la trajectoire de la bille est déviée (voir fig III.1b).
Bien sûr, les équations vectorielles 1.1 et 1.2 restent valables. Par contre, le mouvement étant
maintenant à 2 dimensions, la grandeur de la vitesse après la chiquenaude n'est plus donnée
par l'éq 1.3: l'accélération a conduit à un changement de direction de la vitesse au détriment
de l'augmentation de la grandeur de la vitesse.
Je recommence une dernière fois la manip en appliquant la chiquenaude perpendiculairement
à la trajectoire initiale (voir fig III.1c): la vitesse change notablement de direction, alors que
sa grandeur ne varie pratiquement pas. En fait, sa grandeur ne changerait pas du tout si,
pendant le temps ∆t d'application de la force durant lequel le mobile change progressivement
de direction, la force restait à tout moment perpendiculaire à la trajectoire.
&
Une force appliquée à un mobile perpendiculairement à sa trajectoire modifie la direction
de la vitesse sans en modifier la grandeur.
&
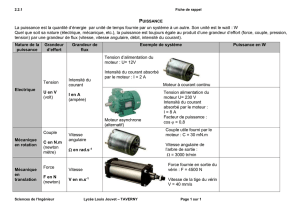
Comment pourrais-je appliquer constamment la force perpendiculairement à la trajectoire? Je
pourrais par exemple attacher la bille à un fil dont je tiendrais l'autre bout. Animée par sa
vitesse initiale, la bille est obligée de rester à une distance constante de ma main (puisqu'elle
est retenue par le fil) et donc décrit une trajectoire circulaire. D'un point de vue physique, il y
a une force qui dévie constamment la bille de la trajectoire rectiligne: c'est la force de traction
du fil, qui tourne en même temps que la bille et qui reste donc toujours perpendiculaire à la
trajectoire (fig III.2a). Dans le cas d'un satellite qui tourne autour de la terre, c'est la force
gravitationnelle attractive qui joue le rôle du fil (fig III.2b)!
v
&
F
traction
av
F
G
b
terre
satellite
fig III.2
Je résume ce que j'ai observé:
(i) pour faire tourner la bille le long d'une trajectoire circulaire, il faut constamment imposer
un changement de direction à sa vitesse en lui appliquant une force perpendiculaire (ou
normale) à sa trajectoire, donc selon la direction d'un rayon de la circonférence vers le centre:
Stéphane Swillens - édition 2009

&
III. Mouvement de rotation
&
III.4
c'est pourquoi cette force est appelée force radiale ou centripète. Elle engendre une
accélération radiale ou centripète.
(ii) pour modifier la grandeur de la vitesse, je dois appliquer une force dans la direction de la
trajectoire. Si la trajectoire n'est pas rectiligne, cette force doit donc être tangentielle, tout
comme l'accélération qu'elle engendre.
&
Enfonçons définitivement le clou: une force appliquée à un objet en mouvement (de même
que l'accélération que cette force engendre) peut être décomposée, par rapport à la trajectoire,
en une composante tangentielle qui modifie la grandeur de la vitesse, et une composante
normale (ou radiale, ou centripète) qui modifie la direction de la vitesse.
&
Mettre un objet en mouvement, c'est-à-dire changer la grandeur de sa vitesse, nécessite une
force tangentielle. Pour ouvrir une porte, je pousse dessus avec une certaine force, mais pas
n'importe comment si je veux économiser mon effort. La porte se mettra plus facilement en
mouvement de rotation autour de son axe
- si la force est grande (bien sûr),
- si j'exerce la poussée loin de l'axe de rotation (si je pousse la porte près de son axe,
c'est vachement dur!),
- si la poussée est dans la direction perpendiculaire au plan de la porte (si je pousse la
porte sur sa tranche, donc vers son axe de rotation, elle ne bougera pas d'un poil!).
Il faudrait donc proposer un concept mathématique qui décrit la cause de la mise en
mouvement de rotation: ce sera le moment de force, qui sera défini à partir du produit
vectoriel. Et puis, comme la notion d'angle est primordiale dans le mouvement de rotation, je
dois d'abord me familiariser avec les variables angulaires.
2. D'abord un peu de math...
2.1 Variables angulaires
Soit x la longueur de l'arc parcouru par un mobile sur une trajectoire circulaire (fig III.3). Cet
arc est sous-tendu par un angle θ (
thêta
). Bien sûr, pour un angle θ donné, la longueur de l'arc
dépend du rayon de la circonférence. Pour tenir compte de cette dépendance, j'exprimerai
Stéphane Swillens - édition 2009

&
III. Mouvement de rotation
&
III.5
l'angle comme le rapport entre la longueur de l'arc sous-tendu et le rayon:
R
x
=θ
2.1
Dans ce cas, je dis que l'angle est exprimé en radian. Pour rappel, le rayon entre environ
3.14159 fois dans une demi-circonférence: c'est le nombre π. Un angle plat de 180°
correspond donc à π rad.
va
tg
ωα
θ
Rx
fig III.3
De même que la vitesse s'obtient en dérivant l'espace parcouru par rapport au temps, la vitesse
angulaire (
oméga
) est un vecteur dont la longueur est obtenue par dérivation de θ: ω
r
R
v
dt
dx
R
1
dt
d==
θ
=ω
r
2.2
où v est la grandeur du vecteur vitesse (toujours dirigé tangentiellement à la trajectoire). Par
convention, le vecteur
ω
r
est dirigé suivant l'axe de rotation et son sens obéit à la règle du tire-
bouchon: dans l'exemple de la fig III.3, comme le mobile tourne dans le sens anti-horlogique,
un tire-bouchon tournant dans ce sens sortirait de la page, et donc le vecteur ω sort du plan de
la feuille: le sens "sortant" est symbolisé par un point encerclé
~
, tandis que le sens "rentrant"
est symbolisé par une croix encerclée ⊗. Je peux utilement remplacer le tire-bouchon par le
capuchon de mon stylo ou par le bouchon de ma bouteille d'eau, au cas où j'aurais un trou de
mémoire... :
r
je tourne dans le sens horlogique = je visse = le capuchon rentre = symbole ⊗
je tourne dans le sens anti-horlogique = je dévisse = le capuchon sort = symbole
~
.
Si je dérive la grandeur de la vitesse par rapport au temps, j'obtiens la composante tangentielle
de l'accélération a
tg
(eh oui, dois-je le répéter? c'est l'accélération tangentielle qui est
responsable de la variation de la grandeur de la vitesse!). En dérivant la vitesse angulaire par
rapport au temps, j'obtiens le vecteur accélération angulaire
α
r
(
alpha
) dont la longueur
vaut donc
R
tg
a
dt
dv
R
1
dt
d==
ω
=α
r
2.3
Stéphane Swillens - édition 2009
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%