ANALYSE NON-LINEAIRE DES MATERIAUX ET DES STRUCTURES

1
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE LYON
DEPARTEMENT GENIE MECANIQUE CONCEPTION
MASTER GENIE MECANIQUE
Laboratoire de Mécanique des Contacts et des Structures (LaMCoS)
UMR INSA-CNRS 5259
Equipe Mécanique des Solides et des Endommagements (MSE)
ANALYSE NON-LINEAIRE DES MATERIAUX
ET DES STRUCTURES
CH-1 Mouvement et Lois de conservation
CH-2 Contraintes et Déformations
CH-3 Lois de comportement
CH-4 Thermodynamique et Hyperélasticité
CH-5 Plasticité et Endommagement
CH-6 Formulations non-locales
Annexe
M. BRUNET
EDITION 2009-2010
© [Michel Brunet], [2009], INSA de Lyon, tous droits réservés


3
CHAPITRE 1. MOUVEMENT ET LOIS DE CONSERVATION
1. DESCRIPTION DU MOUVEMENT
1.1. Formulations d'Euler et de Lagrange
1.2. Le tenseur gradient F
2. LOI DE CONSERVATION EN GENERAL
2.1. Qu'est-ce qu'une loi de conservation
2.2. Le vecteur flux
2.3. Forme locale de la loi de conservation
3. MILIEUX CONTINUS CLASSIQUES
3.1. La loi de conservation de la masse
3.2. Loi fondamentale de la dynamique
3.3. Premier principe de la thermodynamique
3.4. Synthèse
4. PUISSANCES VIRTUELLES
4.1. Théorème des puissances virtuelles
4.2. Remarques sur les puissances virtuelles
© [Michel Brunet], [2009], INSA de Lyon, tous droits réservés

4
1. DESCRIPTION DU MOUVEMENT
1.1. Formulations d’Euler et de Lagrange
Il y a deux possibilités de repérage d’une particule :
Description eulérienne : la particule est repérée par sa position x à l’instant t
Description lagrangienne : elle est repérée par sa position 0, ou plus généralement par une
position de référence X.
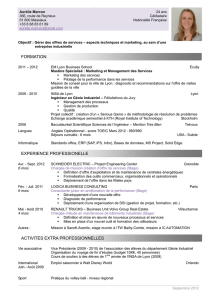
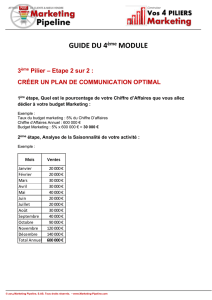
Le mouvement sera défini par la fonction x(X, t) qui donne la position x à l’instant t de la
particule référencée par X, et définit donc la transformation faisant passer de la configuration
de référence Co à la configuration actuelle C (t).
x3
x2
x1
3
e
2
e
1
e
C
(t)
xd
X
3
X
2
X
1
3
E
2
E
1
E
Xd
C
o
Ces deux configurations seront repérées dans deux systèmes de coordonnées que nous
noterons :
XI = (X1, X2, X3) système de coordonnées matérielles
dans la configuration de référence initiale Co
xi = (x1, x2, x3) système de coordonnées spatiales
dans la configuration actuelle déformée C(t)
Ces deux systèmes seront supposés cartésiens orthonormés et on leur appliquera les
conventions de notation habituelles (sommation, dérivation).
Remarque 1 : Dans les applications il est souvent commode de repérer Co et C(t) dans le
même système de coordonnées, c’est-à-dire d’identifier e
i
et
E
I
. Cependant
pour le développement de la théorie, il est préférable de conserver cette distinction.
Remarque 2 : Les coordonnées matérielles X
I
définissent un système cartésien orthonormé
sur la configuration de référence C
o
, mais elles définissent aussi un système
de coordonnées curvilignes sur la configuration actuelle C(t).
© [Michel Brunet], [2009], INSA de Lyon, tous droits réservés

5
1.2. Le tenseur gradient F
Pour caractériser la déformation, on étudie la transformation d’un vecteur matériel :
→ →
dX
→
dx
La transformation s’écrit : x
i
= x
i
(X
I
, t)
En différentiant on a : dx
i =
∂
xi dX j
∂Xj
De même on a : dXI =
∂
XI dx j
∂xj
On définit alors le tenseur gradient F tel que :
→ →
∂
xi
(1)
dx
= F
dX
ou : dxi = FiJ dXJ avec FiJ = ∂XJ
→ →
On a alors :
dX
= F
−1
dx
-1
∂
XI
ou : dX
I
= F
Ij
-1
dx
j
avec F
Ij
= ∂xj
F, application linéaire tangente, permet de caractériser les diverses transformations.
Si comme nous l’avons évoqué plus haut, on utilise le même repère dans la configuration
actuelle et la configuration de référence, il sera commode d’introduire le vecteur déplacement.
(2) x
i
(X, t) = X
i
+ u
i
(X, t)
Le tenseur gradient sera alors :
∂
ui
(3) F
ij
= δ
ij
+ δ
ij
: symbole de Kronecker δ
ij
= 1 si i = j
∂Xj
= 0 si i ≠ j
Transformation de l’élément de volume
On considère un élément de volume dv
o
de la configuration de référence C
o
, qui se transforme
en un élément dv de la configuration actuelle. On démontre que :
Le Jacobien de la transformation est :
(4) D
(
x ,x ,x
)
∂x
2 3
1
J = = det F = det
D
(
X ,X ,X
)
∂X
1 2 3
et la transformation d’un élément de volume s’écrit :
(5) dv = J dvo
© [Michel Brunet], [2009], INSA de Lyon, tous droits réservés
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
1
/
200
100%