poly de cours

TS. φ COURS. Chapitre 12 : Satellites et planètes.
I. Référentiels d’étude.
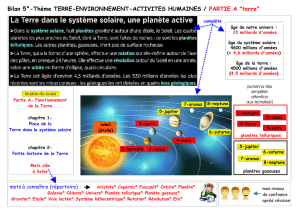
1. Etude du mouvement d’une planète. On utilise le référentiel héliocentrique. C’est un référentiel
galiléen défini par : le centre du soleil et trois axes dirigés vers trois étoiles lointaines supposées fixes.
2. Etude du mouvement des satellites. On utilise un référentiel décrit comme suit : le centre de la planète
et trois axes dirigés vers trois étoiles lointaines supposées fixes.
Si la planète est la Terre, alors le référentiel est le référentiel géocentrique.
II. Propriétés du mouvement d’une planète.
1. Lois de KEPLER.
POINT MATHS : Ellipse.
F et F’ sont les ………………………………….
AA’ = 2a est le ……………………………………
BB’ = 2b est le …………………………………….
Tout point de l’ellipse vérifie : …………………………………………………
e = ……………….. est l’……………………………………….
Si e = 0, l’ellipse devient un …………………………….
Première loi de Kepler : loi des orbites.
Dans le référentiel héliocentrique, la trajectoire du centre d’une planète est une ellipse dont le centre du
soleil est l’un des foyers.
Remarque : à l’exception de Mercure , les ellipses ont une faible excentricité ; les trajectoires décrites sont
donc quasi circulaires.
Deuxième loi de Kepler : loi des aires.
Le rayon vecteur qui relie le centre S du soleil au centre P de la planète balaie des aires égales pendant
des durées égales.
La vitesse de la planète est d’autant plus grande qu’elle
est proche du Soleil.
Le mouvement n’est donc pas uniforme.
Troisième loi de Kepler : loi des périodes.
Le carré de la période de révolution T d’une planète est proportionnel au cube du demi grand axe a de son
orbite elliptique :
k
constante qui ne dépend pas de la planète considérée.
32.,3
msOk
pour le système solaire.
Rq : Cas des planètes dont l’orbite est assimilable à un cercle. On a alors :
k
r
T
3
2
avec
r
, rayon du cercle.
2. Mouvement circulaire uniforme.
a. Définition. Un mobile a un mouvement circulaire uniforme si sa trajectoire est un cercle et si la valeur de
sa vitesse est constante.
La position du mobile est repérée par :
On étudie le mouvement de M grâce à un repère mobile
constitué à l’instant t par :
La position M(t) à l’instant t
2 vecteurs unitaires
T
et
N
, orthogonaux entre eux.

1
/
2
100%