Partie électronique

ECOLE CENTRALE PARIS
SubMarine Centrale Project
Rapport final
Kevin Bourdeaux
Philippe De Wagter
Raphael Liégeois
Grégory Martin
Hai Linh Nguyen
Phi Hai Nguyen
[IMG] Photo du sous-marin
13/06/2008

Table of Contents
Présentation du projet ............................................................................................................................ 3
Partie technique ...................................................................................................................................... 4
Partie mécanique ................................................................................................................................ 4
Partie électronique .............................................................................................................................. 8
Partie informatique ........................................................................................................................... 12
Partie organisationnelle ........................................................................................................................ 12
Chronologie ........................................................................................................................................... 12
Problèmes rencontrés ........................................................................................................................... 13
Apprentissages ...................................................................................................................................... 13
Conclusions ............................................................................................................................................ 15
Remerciements ..................................................................................................................................... 16
Bibliographie.......................................................................................................................................... 17

Présentation du projet
Cette année, nous bénéficions de plusieurs dispenses de cours en tant qu’élèves TIME d’un volume
horaire total d’une centaine d’heures par personne. Nous avons donc recherché un projet de
remplacement d’une taille adéquate et qui combinait nos principaux centres d’intérêt, c'est-à-dire la
mécanique, l’informatique, et l’électronique. C’est pourquoi nous nous sommes lancés dans la
réalisation d’un véhicule sous marin autonome dans les locaux du laboratoire LISA.
Projet sous marin : en quoi cela consiste
Pourquoi le sous marin (…, concours, de tout, ambitieux)
Equipe (rôles en annexe)

Partie technique
Partie mécanique
L’élaboration de notre sous-marin devait respecter les contraintes mécaniques suivantes :
- Etre étanche
- Résister à une plongée de 10 mètres de profondeur
- Etre stable en roulis et en tangage
- Contenir et protéger toute l’électronique embarquée
- Résister à la corrosion
- Pouvoir s’immerger tout seul
Structure générale du sous-marin
Même si dans la réalité les sous-marins s’immergent grâce à un système de ballasts, la réalisation de
ces derniers dans le cadre de notre projet nous paraissait beaucoup trop complexe. Après notre
étude documentaire, une immersion à l’aide d’une poussée verticale fournie par des moteurs nous a
paru être le choix le plus réaliste. Le poids du sous-marin sera donc légèrement inférieur au poids du
volume d’eau qu’il déplace afin que celui-ci remonte naturellement légèrement vers la surface.
L’action des moteurs pour maintenir le sous-marin à une profondeur donnée ou pour le faire
descendre sera donc minime.
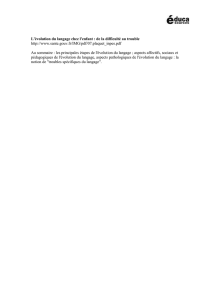
Notre sous-marin est composé d’un caisson étanche contenant tout ce qui doit être préservé de
l’eau, c'est-à-dire tous les composants électroniques et les batteries. Autour du caisson se trouve une
armature métallique permettant de fixer tous les composants extérieurs à celui-ci. Ces composants
sont les moteurs de propulsion, les moteurs d’étrave, la quille, le caisson étanche webcam et le
capteur de pression.
La stabilité en roulis et en tangage est assurée par une quille se trouvant en dessous du sous-marin.
Celle-ci sera lestée à l’aide de poids.
[IMG] structure générale

Caisson étanche
Choix de la forme :
Les contraintes qui régissent le choix de la forme du caisson sont la résistance à la pression et la
disponibilité sur le marché. Nous avons choisi une forme cylindrique car elle résiste naturellement
bien à la pression extérieure et se trouve facilement sur le marché. Un caisson en forme de cigare
aurait été plus hydrodynamique et plus résistant à la pression mais cela n’est malheureusement pas
facilement trouvable sur le marché et cela aurait été beaucoup trop cher à fabriquer.
Choix du matériau :
En se basant sur les mêmes critères que ci-dessus ainsi que pour la résistance à la corrosion, il nous
restait deux choix de matériaux : de l’aluminium ou du PVC pression. Voici un petit comparatif des
deux options qui s’offraient à nous :
Aluminium
PVC-U
Résistance à la pression
+
++
Résistance à la corrosion
+
++
Poids
++
-
Disponibilité sur le marché
--
+
Facilité de transformation
--
++
Nous avons choisi le PVC-U surtout pour sa disponibilité et pour sa facilité de transformation.
Dimensionnement :
Le tube devait avoir un diamètre suffisant pour contenir la carte mère qui est le plus grand des
composants électroniques. La longueur du tube quant à elle a été minimisée en fonction de
l’aménagement intérieur de l’électronique.
Au final, les dimensions de notre tube sont une longueur de 410mm, un diamètre extérieur de
250mm et une épaisseur de paroi de 8mm.
Un côté du caisson est fermé par un bouchon à coller. L’autre est fermé hermétiquement par un
bouchon à visser contenant un joint.
[IMG] tube orange
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%