²a - François DURAY

1
DURAY François
FUMADELLES Brice
FIRBAL Yannick Année 2005/2006

2
I) Introduction p.3
II) Architecture générale du « Snowscoot motorisé » p.4
Principe du snowscoot motorisé.
Définition du snowscoot motorisé
o Motorisation
o Transmission de puissance
o Accélérateur/frein
o Liaison snowscoot/kit de motorisation
III) Etudes technique détaillées p.6
Système de transmission de puissance.
Fixation des patins glisseurs avant.
Liaison châssis/snowscoot
IV) Commande de gaz p.22
V) Bibliographie p.23

3
I) INTRODUCTION
Objectif : Notre objectif est la conception d’un kit de motorisation facile
d’utilisation et adaptable sur la plupart des snowscoots actuels.
Dans notre cas nous allons étudier la motorisation du snowscoot par
propulsion à chenillette à l’aide d’un moteur thermique.
Cahier des charges : * Vitesse minimum souhaitée : 30 à 40 km/h.
* Poids : 1 personne + snowscoot motorisé 130kg
* Energie : thermique
* Encombrement maxi du système de motorisation : 300
x 250 x 300.
* Environnement d’utilisation : neige.
Nous avons tout d’abord glané un maximum d’informations sur les moteurs et les
snowscoots existants afin de partir sur les meilleures bases possibles pour la
réalisation de notre produit.
La suite de nos recherches ainsi que la phase de conception sont décrite dans les
pages suivantes.

4
II) Architecture générale du « snowscoot motorisé »
- Principe du snowscoot motorisé à chenillette :
Le principe du snowscoot motorisé reprend en partie le principe du snowscoot
classique : en effet par le fait qu’il s’agisse d’un kit de motorisation à rajouter cela
n’altère en rien le snowscoot de l’utilisateur et ainsi l’esprit « glisse » du
snowscoot est préservé. Le snowscoot motorisé permet ainsi à l’utilisateur de
pouvoir se déplacer sur la neige facilement et sans efforts.
Cette version du snowscoot n’en est encore qu’en période d’essais mais notre but
dans un futur proche est une version qui permettra à l’utilisateur de parcourir de
grandes distances sur la neige avec une autonomie d’à peu près 50km.
- Définition de snowscoot motorisé à chenillette :
Le snowscoot motorisé doit permettre à un utilisateur d’évoluer de façon motorisée
sur la neige.
Motorisation :
Nous avons choisi un moteur thermique, sachant que l’utilisation du snowscoot
sera essentiellement sur la neige (besoin d’une importante vitesse de rotation). En
effet, il est préférable d’opter pour une propulsion thermique plutôt que pour une
alternative électrique en raison de son avantage en puissance, en autonomie, et pour
sa robustesse. Un moteur électrique poserait des problèmes à cause des batteries
qui craignent le froid et qui alourdiraient la machine.
Le moteur est situé à l’arrière sur un châssis directement en liaison pivot avec le
snowscoot. La transmission de puissance est assurée par chaînes reliées au pignon
entraîneur de la chenillette.
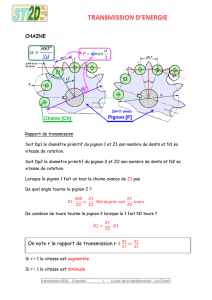
Transmission de puissance :
Afin de motoriser la chenillette arrière du Snowscoot, nous utilisons un système de
transmission par roues dentées et chaînes. Cette transmission se déroule en 2
étapes. Tout d’abord, la roue dentée de sortie du moteur est reliée à une autre roue
dentée par une première chaîne de transmission. Ce sera le premier rapport de
réduction du système de transmission. En suivant, sur l’arbre de cette même roue
dentée se trouve une autre roue dentée qui fait partie de la deuxième partie du

5
rapport de réduction. Cette roue dentée est reliée à la roue dentée de la chenillette
par une chaîne et l’ensemble premier et deuxième rapport constitue le rapport de
réduction total pour transmettre la puissance du moteur à la chenillette.
Système de commande accélérateur/frein :
Le freinage s’effectue par simple relâchement de la manette des gaz ; les
frottements, l’inertie et le poids du système font qu’il ralentit suffisamment par lui
même. Le principe d’accélération s’apparente à celui du freinage d’un vélo, c'est-à-
dire par action mécanique sur une poignée qui permet de tendre le câble
d’accélérateur et donc de faire avancer le snowscoot.
Un système coupe circuit, similaire à ceux utilisés pour les jets ski, est intégré à la
poignée pour permettre au snowscoot de s’arrêter si l’utilisateur venait à être éjecté
de celui-ci.
Liaison snowscoot/kit de motorisation :
La chenillette doit avoir un maximum de contact sur le sol pour propulser le
système et donc pour avoir une adhérence maximale, il doit rester en position à plat
pour reposer entièrement sur le sol même si le snowscoot ce penche sur le coté car
pour tourner il doit ce mettre sur les carres.
Pour ces raisons de contraintes, nous positionnerons une liaison pivot entre le
plateau et le châssis moteur pour conserver toutes les caractéristiques évoquées ci-
dessus.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%