1 diapo par page - Sylvain Tisserant

Systèmes embarqués
Cours 6
Systèmes embarqués
Sylvain Tisserant - ESIL

Systèmes embarqués - S. Tisserant - ESIL - 2009
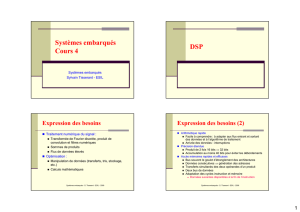
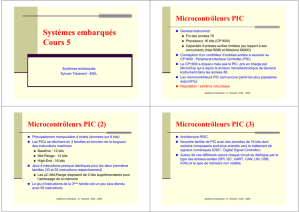
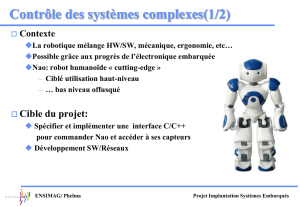
Principes
Capteurs avec
conditionnement
Actionneurs avec
conditionnement
CAN
CNA
Système
numérique
de
contrôle
commande
Système
physique

Systèmes embarqués - S. Tisserant - ESIL - 2009
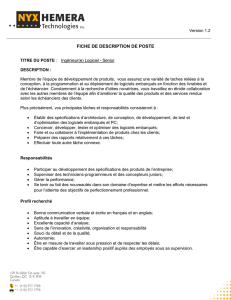
Principes (2)
Aujourd’hui : transformer une grandeur physique m en un signal de
nature électrique (tension, courant ou charge)
s = signal, m = mesurande, f = caractéristique, g = environnement,
"parasites" , etc.
Système numérique : conversion analogique numérique (quantification)
et vice-versa
Exploitation plus simple si caractéristique linéaire
Sensibilité (pour des petits signaux)
Pour un capteur idéal, S doit être insensible à m (linéarité) et à sa
fréquence de variation (bande passante), au vieillissement et à
l’influence de l’environnement (température, éclairement, etc.)
,...)g,g,m(fsou)m(fs
2
1
=
=
)m(
dm
df
SmSs =⇔δ=δ

Systèmes embarqués - S. Tisserant - ESIL - 2009
Capteurs actifs

Systèmes embarqués - S. Tisserant - ESIL - 2009
Capteurs passifs
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
1
/
43
100%