Energie mécanique - Probl`emes `a un degré de liberté

M´ecanique 1 - Energie page 1/10
´
Energie potentielle - ´
Energie
m´ecanique - Probl`emes `a un
degr´e de libert´e
Table des mati`eres
1 Puissance et ´energie cin´etique 1
1.1 D´efinitions ............................. 1
1.2 Th´eor`eme de la puissance cin´etique ............... 2
2´
Energie potentielle 2
2.1 D´efinition d’une force conservative ................ 2
2.2 Force de pesanteur ........................ 3
2.3 Force de rappel ´elastique ..................... 3
2.4 Force de frottement ........................ 4
3´
Energie m´ecanique 4
3.1 D´efinition ............................. 4
3.2 Conservation ........................... 5
3.3 Application `a la chute libre verticale .............. 5
4 Probl`eme `a un degr´e de libert´e 6
4.1 Positions d’´equilibre ....................... 6
4.1.1 ´
Equilibre stable - Exemple du ressort .......... 6
4.1.2 ´
Equilibre instable - Exemple du pendule ........ 7
4.1.3 G´en´eralisation ....................... 8
4.2 Petits mouvements au voisinage d’une position d’´equilibre stable 9
4.2.1 Exemple du pendule ................... 9
4.2.2 G´en´eralisation ....................... 9
1 Puissance et ´energie cin´etique
1.1 D´efinitions
La puissance de la r´esultante des forces −→
Fqui s’exercent sur le point ma-
t´eriel M o`u −→
vest la vitesse de M, est d´efinie par :
P=−→
F .−→
v
ATS - Sciences Physiques Lyc´ee Jean Moulin, B´eziers

M´ecanique 1 - Energie page 2/10
On d´efinit l’´energie cin´etique de M o`u mest la masse de M et −→
vsa vitesse
par :
Ec=1
2mv2
1.2 Th´eor`eme de la puissance cin´etique
Dans un r´ef´erentiel galil´een, la puissance instantan´ee de la r´esultante des
forces exerc´ees sur M est ´egale `a la d´eriv´ee par rapport au temps de son
´energie cin´etique.
dEc
dt =P
D´emonstration : Multiplions scalairement la 2eloi de Newton par −→
v
2´
Energie potentielle
2.1 D´efinition d’une force conservative
Une force est conservative (on dit aussi qu’elle d´erive d’une ´energie poten-
tielle) s’il existe une fonction Ep(x, y, z) appel´ee ´energie potentielle telle que
la puissance de cette force peut s’´ecrire
P=−dEp
dt
L’´energie potentielle est d´efinie `a une constante pr`es.
ATS - Sciences Physiques Lyc´ee Jean Moulin, B´eziers

M´ecanique 1 - Energie page 3/10
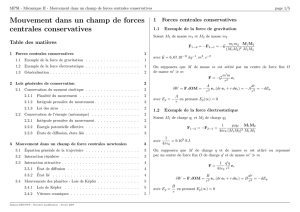
2.2 Force de pesanteur
z
x
O
alpha
v0
g
L’´energie potentielle de pesanteur Epp associ´ee au poids −→
P=m−→
gd’un point
mat´eriel, s’´ecrit
Epp(z) = mgz +cte
Pour d´eterminer la constante, on fixe une valeur particuli`ere de Epp, par
exemple Epp(0) = 0 nous donne cte = 0.
Attention `a l’orientation des axes : Epp change de signe si l’orientation de
(Oz) change de sens.
2.3 Force de rappel ´elastique
L’´energie potentielle ´elastique Epe associ´ee `a la force de rappel du ressort −→
T,
s’´ecrit
Epe(x) = 1
2k(l−l0)2+cte =1
2kx2+cte
Pour d´eterminer la constante, on fixe une valeur particuli`ere de Epe, par
exemple Epe(0) = 0 nous donne cte = 0.
ATS - Sciences Physiques Lyc´ee Jean Moulin, B´eziers

M´ecanique 1 - Energie page 4/10
2.4 Force de frottement
Dans le cas de l’oscillateur horizontal ci-dessus, la force de frottement fluide
est de la forme −→
f=−α−→
v. La puissance de cette force s’´ecrit :
Pf=−→
f .−→
v=−αv2
Pfne peut pas se mettre sous la forme de la d´eriv´ee d’une ´energie potentielle,
cette force est non conservative.
3´
Energie m´ecanique
3.1 D´efinition
L’indice cfait r´ef´erence aux forces conservatives et l’indice nc aux forces
non conservatives. On d´esigne par −→
Fcla r´esultante des forces conservatives
et par −→
Fnc la r´esultante des forces non conservatives. On a alors :
Ec+Ep=Emest appel´e ´energie m´ecanique
Dans un r´ef´erentiel galil´een, la d´eriv´ee de l’´energie m´ecanique par
rapport au temps est ´egale `a la puissance des forces non conserva-
tives :
dEm
dt =Pnc
D´emonstration :
ATS - Sciences Physiques Lyc´ee Jean Moulin, B´eziers

M´ecanique 1 - Energie page 5/10
3.2 Conservation
Si la puissance dissip´ee par les forces non conservatives est nulle `a
tout instant alors Em=cte (´equation appel´ee int´egrale premi`ere
du mouvement ou encore int´egrale premi`ere de l’´energie).
Exemple du ressort : Ecrire l’int´egrale premi`ere du mouvement et retrouver
l’´equation diff´erentielle du mouvement.
Exemple du pendule : Ecrire l’int´egrale premi`ere du mouvement et retrouver
l’´equation diff´erentielle du mouvement.
3.3 Application `a la chute libre verticale
Une bille de plomb, assimilable `a un point mat´eriel M de masse m= 10g,
est lˆach´ee `a l’instant t= 0 depuis une altitude h= 1mau dessus du sol (o`u
se situe l’origine de l’axe (Oz) vertical ascendant). Les frottements peuvent
ˆetre n´eglig´es, la bille n’est soumise qu’`a son poids. On note g= 10m.s−2le
module de l’acc´el´eration de la pesenteur et zl’altitude (ou cote) de la bille.
Trouver l’expression de la vitesse de la bille juste avant qu’elle ne touche le
sol puis la calculer.
ATS - Sciences Physiques Lyc´ee Jean Moulin, B´eziers
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%