1 Chapitre I Rappel Les équations différentielles du mouvement des

Chapitre I, cours de vibrations, ondes et optique_Phys3 Pr. Badis Bennecer
LMD 2007-2008
1
Chapitre I
Rappel
Les équations différentielles du mouvement des systèmes peuvent être obtenues par deux
méthodes, l’une vectorielle (méthode de Newton) qui résulte de l’application des théorèmes
généraux de la mécanique classique (théorème de la quantité de mouvement et théorème du
moment cinétique) et l’autre est une méthode analytique (méthode de Lagrange) qui utilise des
grandeurs scalaires ( l’énergie cinétique, l’énergie potentielle, etc…)
I.1. Quantité de mouvement et théorème de la quantité de mouvement
Par définition, la quantité de mouvement p
r
d’une particule de masse m et de vitesse v
r est
donnée par vmp
r
r
=. La dérivée de la quantité de mouvement par rapport au temps nous donne le
théorème de la quantité de mouvement et qui est donnée par : Fdtpd
r
r
=/ , où F
r
est la résultante
des forces qui agissent sur la particule.
I.2 Moment cinétique et théorème du moment cinétique
Par définition le moment cinétique L
r
d’une particule de quantité de mouvement p
r
par rapport à
un point o est donné par :
prL o
r
r
r∧=
/ (I.1)
où
r
rest le vecteur position de la particule. Supposons que le point o est fixe et dérivons la
relation (1.1) par rapport au temps, on obtient :
dt
pd
rp
dt
rd
L
dt
Ld o
r
rr
r
r
r
∧+∧== .
/ (I.2)
Comme le point o est fixe est dtrd /
rest la vitesse v
r
du point matériel liée à sa quantité de
mouvement par vmp
r
r
= le premier terme de la relation (I.2) est nul. En utilisant la loi de Newton
Fdtpd
r
r
=/ , la relation (I.2) s’écrit
)(
/
/FMFr
dt
pd
r
dt
Ld o
orrr
r
r
r
r
=∧=∧= (I.3)
Cette relation représente le théorème du moment cinétique par rapport au point o.
Remarque : moment cinétique par rapport à un axe fixe
L’équation (I.3) est une équation différentielle vectorielle, si on la projette sur les axes d’un
repère cartésien (oxyz) on obtient :
z
z
y
y
x
xM
dt
dL
M
dt
dL
M
dt
dL === ,,
Chacune de ces équations est une équation différentielle scalaire, par exemple, la première
représente l’équation des moments par rapport à ox.

Chapitre I, cours de vibrations, ondes et optique_Phys3 Pr. Badis Bennecer
LMD 2007-2008
2
rd
r
f
r
t
M
C
θ
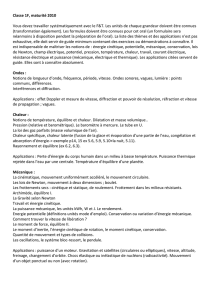
I.3. Travail et énergie
a. travail
Le travail élémentaire dw d’une force f
r
, agissant sur un point matériel M dans un
déplacement élémentaire rdrle long de la trajectoire C est donné par le produit scalaire de
f
r
par rdr.
θ
cosfdrrdfdw =⋅=
r
r
si cosθ > 0 le travail est dit moteur (dw > 0)
si cosθ < 0 le travail est dit résistant (dw < 0)
En général si le point matériel parcourt un arc
A
Bsur la trajectoire, le travail le long de cette
courbe sera l’intégrale du travail élémentaire :
∫++=
B
AzyxAB dzfdyfdxfw
La puissance instantanée est définie comme le travail par unité de temps (c'est-à-dire la vitesse à
laquelle le travail est fait)
vf
dt
dw
Pr
r
.==
Dans le système SI, le travail est exprimé en joule (J). Un joule est donc le travail effectué par
une force d’un newton quand elle déplace un point matériel d’un mètre dans la direction de la
force ; J= Nm = m2kgs-2.
b. Energie cinétique
Le travail élémentaire d’une force f
r
agissant sur un point matériel peut être écrit sous la
forme :
)()
2
(
2
c
Ed
mv
dvdvmdtv
dt
vd
mrdfdw ==⋅=⋅=⋅= rrr
r
r
r
où Ec=mv2/2 : est l’énergie cinétique du point matériel.
Remarque :
2
vvv =⋅
r
r
⇒ vdvvvdvvd 22)( =⋅=⋅ rrrr .
Le travail total accompli en déplaçant la particule de A à B est obtenu en intégrant de A à
B :
22
)(
22
,,
AB
AcBc
B
Ac
B
A
AB mvmv
EEEddww −=−=== ∫∫

Chapitre I, cours de vibrations, ondes et optique_Phys3 Pr. Badis Bennecer
LMD 2007-2008
3
y
y
gm
r
Cette dernière expression représente le théorème de l’énergie cinétique et qui s’énonce comme
suit :
‘’Le travail effectué sur un point matériel est égal à la variation de son énergie cinétique.’’
On définira alors l’énergie cinétique comme étant la capacité d’un point matériel pour faire un
travail grâce à son mouvement.
c. notion de potentiel et énergie potentielle
c.1 : notion de potentiel :
Il arrive fréquemment que le travail élémentaire d’une force F
r
qui s’exerce sur un point matériel
M s’écrit sous la forme d’une différentielle totale (exacte) d’une certaine fonction scalaire
v(x,y,z) :
dvdzfdyfdxfrdfdw zyx =++=⋅=
r
r
Définition: la forme différentielle dw= Pdu+Qdv+Rdn où P, Q, et R sont trois fonctions
des trois variables (u, v, n) n’est une différentielle exacte (totale) que si P, Q,R sont les
dérivées d’une fonction f respectivement par rapport aux variables u, v, n ;
n
f
v
f
u
f
P∂
∂
∂
∂
∂
∂
=;;
vdgravfdzfdyfdxfrdfdw zyx
r
r
r
r
r=∇=⇒++=⋅= et dans ce cas on dit que le champ de force
derive d’un potential (ou il est conservative).
Sachant que 0
r
rr =∇∧∇ v, la condition pour qu’un champ de force dérive d’un potentiel est
0=
∂
∂
−
∂
∂
=
∂
∂
−
∂
∂
=
∂
∂
−
∂
∂
y
f
x
f
x
f
z
f
z
f
y
fx
y
z
x
y
z
c.2 : énergie potentielle
On appelle énergie potentielle Ep, l’énergie du système qui dépend de la configuration
des particules du système et de leurs positions. L’énergie potentielle est liée au potentiel
‘’fonction de force’’ par :
rdfdVdEp
r
r
⋅−=−=
d’où
∫
+−= teconsdVEptan
on peut écrire :
121,2, wEEE
rdfdE
ppp
p
−=−=Δ
⋅−=−
r
r
D’après cette relation l’énergie potentielle n’est définie qu’à une constante additive près. En
général, on définit une position de référence ‘origine’ pour laquelle Ep=0, et on mesure la
variation de l’énergie potentielle et non pas sa valeur absolue.
Exemple :
1. Energie potentielle d’un corps dans un champ de pesanteur uniforme
cstemgyEmgdydE pp +−=⇒=− .

Chapitre I, cours de vibrations, ondes et optique_Phys3 Pr. Badis Bennecer
LMD 2007-2008
4
l
θ
u
r
α
mgcosαs
-mgsinα
O
gm
r
m
Pour déterminer la constante on choisit une position de
Référence pour laquelle Ep est nulle, le niveau de la mer
Par exemple.
2. Energie potentielle de l’attraction gravitationnelle de deux points matériels
rdfdEp
r
r
.=−
∫
=dr
r
mGm
Ep2
21
cste
r
mm
GEp+−= 21
Généralement, on prend ∞=
r
comme position de référence et cste=0 ; alors r
mm
GEp21
−= .
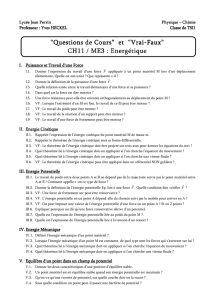
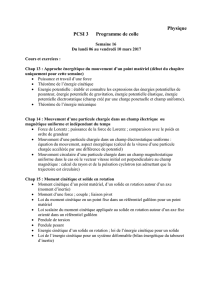
3. Energie potentielle d’un pendule simple
αα
α
α
uldumgrdgmdEp
r
r
r
r
.sin. −==−
α
sinmgl−=
∫=−== cstemglmglEp
αα
cossin
Ep= 0 pour α = 0 ⇒ Ep(0)=-mgl+cste=0 ⇒cste=+mgl
Alors,
Ep= mgl(1-cosα)
IV-6 Energie totale
L’énergie totale d’un système est donnée par la somme de l’énergie cinétique (dû au
mouvement du système) et de l’énergie potentielle (qui dépend de la configuration des particules
du système),
Etot=Ec + Ep
On a vu que pour les forces conservatives
Ec,2 - Ec,1= w12
Ep,2 – Ep,1 = -w12
d’où
Ec,2 - Ec,1=Ep,1 – Ep,2 ⇒ Ec,1 + Ep,1=Ec,2 + Ep,2
Cette relation indique que l’énergie totale pour un système soumis à des forces conservatives
reste constante ‘’ loi de conservation de l’énergie totale’’.
rdr
m1
m2
f
r
r

Chapitre I, cours de vibrations, ondes et optique_Phys3 Pr. Badis Bennecer
LMD 2007-2008
5
x
m
Dans le cas général, les forces qui agissent sur un système peuvent être divisées en forces
conservatives (qui dérivent d’un potentiel) et forces qui ne dérivent pas d’un potentiel (forces de
frottement par exemple) et on peut écrire :
ncc fff
r
r
r
+=
où c
f
r
est la résultante des forces qui dérivent d’un potentiel et nc
f
r
est la résultante des forces
qui ne dérivent pas d’un potentiel. Dans ce cas le théorème de l’énergie cinétique s’écrit :
nccncc dwdwrdfrdfrdfdw +=+==
r
r
r
r
r
r
...
nc
dwdVmvdrd
dt
pd
dw +===⇒ )
2
1
(. 2
r
r
nc
cdwdVdE =−⇒
ou
nc
pc dwEEd =+ )(
si nc
f
r
est force de résistance dwnc est négatif.
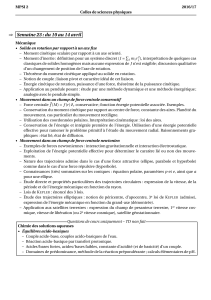
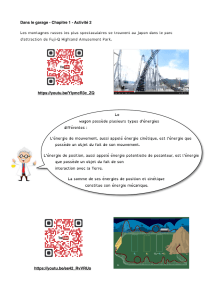
Exemple :
Prenons le cas d’un système simple : masse attachée à un ressort
de constante de raideur k et un amortisseur de constante α.
L’équation différentielle s’écrit :
0
... =++ kxxxm
α
et
)(.
2
1
2
...
2
2
.
kxxxmdEkx
xm
Etottot +=⇒+=
L’équation différentielle donne :
...
)( xkxx
α
−=+ , alors 0)()(. 2
.... <−=+= xkxxxmdEtot
α
, car
2
.
)(xest toujours positive.
f=-αv
1
/
5
100%