4 proposition de correction

JLB
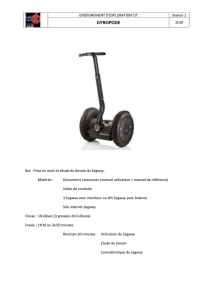
Dossier Gyropode
–
TD de synthèse
Proposition de Correction
7
4 PROPOSITION DE CORRECTION
Validation du besoin
Fonctions de service en Phase d’utilisation
8
Dossier Gyropode
–
TD de synthèse
Proposition de Correction
JLB
Les autres phases à étudier sont :
- Charge de la batterie (sécurisation de l’usager et du système)
- Maintenance (accessibilité des pièces)
- Transport (encombrement / démontage)
- Stockage – Parking (verrouillage, démontage …)
Cahier des charges (Segway)
Fonction de service
Critère
Niveau
Flex
FP1
: permettre à
l’usager de se
déplacer sans effort
Accélération
1.5 m/s
2
0
Distance d’arrêt
3m à 20 km/h
0
Vitesse
Jusqu’à 20 km/h
0
Autonomie
Jusqu’à 38 km
1
FP2
: être très
manoeuvrable
Rayon Braquage
0.5 m à 5 km/h
0
10 m à 20 km/h
0
0 m à 0 km/h
0
Encombrement / sol
50
x
60 cm
1
FP3 : donner au
conducteur un
sentiment de stabilité
Temps de réponse
< 1 seconde
1
Hauteur perturbation
5 cm
1
Hauteur
pilote
/ sol
< 20 c
m
1
Dimensions des roues
Dia x larg > 40 x 4 cm
1
FC1
: sécuriser
l’utilisateur
Inclinaison maxi
< 22° marche normale
0
Protection latérale
mi
-
mollet
1
Chute utilisateur
Arrêt total
0
Confort
1
Redondance capteurs
X 2
0
FC2
: être facile à
piloter
Ergonomie
Commande 1 main
1
Instinctif
Réaction
angle <
2°
0
Montée en vitesse
Accélération < 1 m/s²
0
FC3
: s’adapter
Réglage guidon
Jusqu’à pilote 1.90 m
0
Largeur pied
> 10 cm
0
FC4
: respecter
Norme cyclomoteur
0
FC5
: résister
Résista
nce pluie
0 corrosion
0
Démarrage
∀
∀∀
∀
temps
0
Résistance choc
0 dégât < 10 km/h
1
FC6
: Plaire
Choix de couleur
> 3
1
Ligne
Codes sport de glisse
1
Personnalisable
carter

JLB
Dossier Gyropode
–
TD de synthèse
Proposition de Correction
9
10
Dossier Gyrop
ode
–
TD de synthèse
Questions suite …
JLB
5 QUESTIONS SUITE …
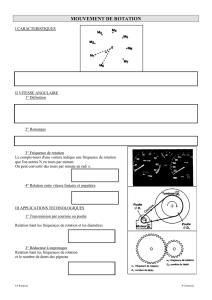
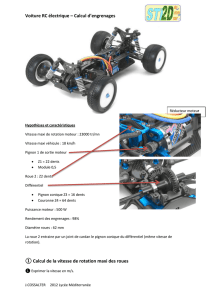
On s’intéresse à présent dans le détail aux éléments de la chaîne de transmission
Caractéristiques fournies par le constructeur du moteur
Puissance nominale / Tension nominale 200 W / 24 V
Puissance maximale > 250 W
Vitesse de rotation nominale 3450 trs/mn (± 5%)
Vitesse de rotation maximale 4250 trs/mn (± 5%)
Courant maximum recommandé < 8.9 A
Couple maximum recommandé 0.55 N.m (± 5%)
Rendement nominal 0.73 (73%)
Q6) Compte tenu de la vitesse annoncée par le constructeur déterminez la vitesse à
laquelle doivent tourner les roues de l’Ewee lorsque celui-ci avance en ligne
droite.
Q7) Déterminez le rapport de réduction offert par l’ensemble poulie courroie et
déduisez en la vitesse de rotation nécessaire au niveau du moteur pour atteindre
la vitesse de déplacement. Conclusions compte tenu des performances annoncées
par le constructeur du moteur
Q8) Donnez deux fonctions pour le réducteur poulie courroie ?
Q9) Comment se traduit le couple moteur au niveau du sol ?
Vous mesurerez sur le système les grandeurs nécessaires

JLB
Dossier Gyropode
–
TD de synthèse
Proposition de correction
11
6 PROPOSITION DE CORRECTION
Le constructeur annonce une vitesse de 16 km/h maxi.
Ce qui correspond à s/m 44.4
3600
1000
16
≈
×
La roue a un diamètre de 0.14 m soit un périmètre de π×0.14 ≈ 0.44 m.
On a donc tr/mn 606 tours/s 1.10
44.0
44
.
4
≈≈
La poulie crantée solidaire de la roue possède 98 dents, le pignon solidaire du moteur
en possède 16. Il faut donc
125.6
16
98
≈ tour de moteur pour 1 tour de roue. Le rapport
de réduction est de 6.125.
Le moteur tourne donc à ≈ 3712 tr/mn.
Le réducteur permet de réduire la vitesse du moteur de façon que les roues ne
tournent pas trop vite.
Il permet aussi d’augmenter le couple transmissible. C’est exactement la même idée
que lorsque, sur un vélo, on passe sur le petit plateau et le grand pignon : le moteur a
moins « d’effort » à fournir pour entraîner le gyropode.
Au niveau du sol, le couple se traduit par un effort de la route sur la roue : c’est ce qui
provoque l’avancement (voire l’accélération) du gyropode.
1
/
3
100%