PCSI Les Ulis TD01 Systèmes Linéaires Continus Invariants

PCSILesUlisTD01SystèmesLinéairesContinusInvariants
Exercice n°1
1 - Déterminer la transformée de Laplace d’un créneau :
x(t) = 0 pour t < 0 et T0 t
x(t) = X
0 pour 0 t < T0
2 - Déterminer et tracer la réponse à l’entrée définie ci dessus, d’un système du premier ordre.
( fonction de transfert H(p) = K
1 + p )
Exercice n°2
1 - Calculer la transformée de Laplace de la fonction définie par :
x(t) = 0 pour t < 0
x(t) = V
0 t pour 0 t < T0
x(t) = X
0 = V0 T0 pour T0 t
2 - Déterminer et tracer la réponse à l’entrée définie ci dessus, d’un système du premier ordre
( fonction de transfert H(p) = K
1 + p )
Exercice n°3 : Schémas blocs
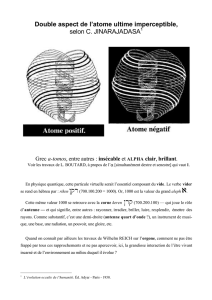
1 - Retrouvez, sans calculs, l’expression de la sortie Y(p) de ce système
asservi en fonction de l’entrée X(p) et de la perturbation Z(p) en utilisant le
théorème de superposition qui permet de décomposer le problème posé en la
somme de deux problèmes simples (boucle avec retour).
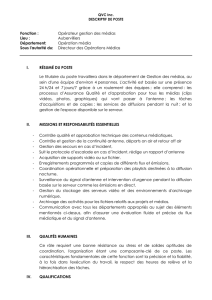
2 - Sans calculs, en utilisant les règles de
déplacement des points de jonction et de sommation,
déterminer l’expression de la sortie Y(p) du système
asservi ci-dessous, en fonction de l’entrée X(p)
Exercice n°4 :
La bonne réception de signaux hertziens envoyés par un satellite nécessite l'utilisation d'une antenne parabolique, celle-ci devant être
orientée correctement par rapport au satellite émetteur. Dans le cas d'une antenne fixe (pointant toujours vers le même satellite), cette
mise en position est effectuée à l'installation de l'appareil.
Actuellement, plusieurs groupes industriels proposent différentes gammes de programmes accessibles à partir de plusieurs satellites.
Ceci laisse le consommateur devant un cruel dilemme de choix de satellite émetteur. Afin d'échapper à ce choix difficile, le
consommateur peut s'équiper d'une antenne motorisée dont il peut modifier l'orientation afin de capter les transmissions de différents
satellites. Ce type de positionnement nécessite 2 mobilités en rotation (associées par exemple aux deux premiers angles d'Euler). Dans
cet exercice, il vous est proposé d'étudier le fonctionnement de la chaîne d'action associée à l'une de ces 2 mobilités.
Partie I – Etude de la chaîne d'action associée à l'angle de précession
X(p) Y(p)
+- +-
Z(p)
R(p)
G1(p) G2(p)
X(p) Y(p)
+-+-G3(p)
G2(p)
+ +
G1(p)
G4(p)

PCSILesUlisTD1SLCI
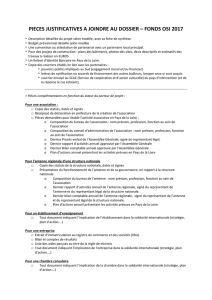
La chaîne d'action étudiée est composée d'un moteur électrique à courant continu à commande par l'induit et d'un réducteur qui
entraîne la parabole en rotation. Le moteur est commandé à partir du circuit électrique présenté sur la figure suivante.
Moteur Réducteur
A
n
t
e
n
n
e
La
Ra
i
a
(t)
e
a
(t) e
b
(t)
M
o
t
e
u
r
U
Figure 1 : chaîne d'action du mouvement de précession
de l'antenne
Figure 2 : circuit électrique de commande du moteur
On utilise les notations suivantes :
- ea(t) : tension d'alimentation de l'induit;
- ia(t) : courant d'induit;
- Ra, La : résistance et inductance de l'induit;
- Eb(t) : force contre électromotrice;
- m(t), c(t) : couple moteur et couple résistant de la charge;
- (t), (t) : position et vitesse de rotation angulaires de l'arbre moteur;
- J : moment d'inertie de la partie mécanique (moteur, réducteur et antenne) ;
- b : coefficient de frottement visqueux ;
- Ki : constante de couple;
- Kb : constante de force contre-électromotrice.
Le comportement du système électro-mécanique présenté est régi par l'ensemble des équations suivantes :
- les équations traduisant le comportement électrique des éléments du circuit donnent :
- l'étude mécanique de la chaîne d'action nous permet d'écrire les équations suivantes :
les équations de couplage reliant les grandeurs mécaniques et électriques sont données ci-après :
En supposant que toute la puissance électrique est convertie en puissance mécanique dans le moteur, on peut montrer que l'on a : Ki =
Kb.
1) Question 1
En supposant que le système est au repos à t = 0, transformez dans le domaine de Laplace les équations régissant le comportement
électro-mécanique du système.

PCSILesUlisTD1SLCI
2) Question 2
Complétez le schéma bloc décrivant le fonctionnement du processus
+
+
+-
EaIa
Γc
ΩΘ
U
schéma bloc du processus.
3) Question 3
Déterminez l'équation reliant :
Partie II – Asservissement de la position de l'antenne.
La présence d'un couple résistant sur l'arbre de sortie du moteur peut avoir plusieurs causes : des frottements dans les liaisons du
système, l'action du vent sur la parabole, le choc d'un objet lancé malencontreusement sur l'antenne… . Ce couple, agissant comme
une perturbation, peut alors modifier l'orientation de l'antenne et donc dégrader la réception de la transmission.
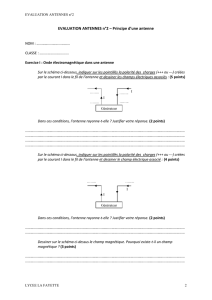
Afin de palier ce problème, il est nécessaire de modifier le système en réalisant un asservissement en position de l'antenne. On ajoute
alors :
- un capteur, qui renvoie un signal proportionnel à la position angulaire de l'antenne;
- un amplificateur, qui amplifie l'écart entre la tension de consigne et la mesure faite par le capteur.
On obtient alors le schéma bloc suivant (où A et C sont des constantes):
+-
EaIa
Γc
ΩΘ
+-
EcA
C
+
+
U
Figure 3 : schéma bloc du système asservi.
On étudie dans la suite du problème le comportement dynamique du système sans tenir compte de la perturbation c
4) Question 4
Complétez le schéma bloc associé au système pour lequel on ne tient pas compte des perturbations en remplaçant le bouclage entre Ea
et par un bloc fonctionnel.

PCSILesUlisTD1SLCI
E
a
ΩΘ
+-
E
cA
C
ε
schéma bloc simplifié du système asservi.
5) Question 5
Quelle est la fonction de transfert du système : H(p) = (p)/Ec(p).
6) Question 6
On place en entrée du système un échelon : ec(t) = u(t).
Déterminer la valeur limite (quand ) de la sortie (t) et de l'écart (t) entre l'entrée et la mesure de la sortie. Que pensez-vous
de la précision du système.

PCSILesUlisTD1SLCI
1
/
5
100%