IV. Moments

Moments
69
69
MOMENTS

Moments
70
70
IV. MOMENTS. THEOREME DU MOMENT CINETIQUE. APPLICATION :
MOUVEMENT A FORCE CENTRALE....................... ERREUR ! SIGNET NON DEFINI.
1. MOMENT D'UNE FORCE ...................................................................................................... 71
2. MOMENT CINETIQUE.......................................................................................................... 71
3. THEOREME DU MOMENT CINETIQUE .................................................................................. 73
4. APPLICATION : MOUVEMENT A FORCE CENTRALE .............................................................. 75
5. EXTENSIONS : MOMENT D'UN COUPLE, ET MOMENT PAR RAPPORT A UN AXE ..................... 77
5.1 Moment d'un couple ................................................................................................... 77
5.2 Moment par rapport à un axe .................................................................................... 77
6. CONCLUSION ..................................................................................................................... 77
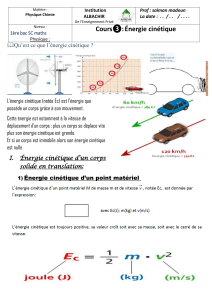
Moment cinétique
O
M
Rappel :
Moment d’une force
O
M
f
mOMF=∧
JJJG JJJJGJG
F
JG
LOM p
=
∧
J
G JJJJGJG
p
JG
pmV=
JG JG

Moments
71
71
IV. Moments.
Théorème du moment cinétique.
Application : mouvement à force centrale
1. Moment d'une force
Le moment d'une force F
JG
, appliquée en un point M, par rapport à un point O, est
défini par :
fOM Fm=∧
JJJG JJJJGJG
moment d’une force (1)
L'unité SI est le m.N : attention, une énergie s'exprime aussi en m.N, ou N.m (ou Joule), mais
les deux grandeurs ne sont pas de même nature: l'énergie est un scalaire, tandis que le moment
d'une force est un vecteur. Ne pas écrire mN qui signifierait milliNewton.
Pour un segment OM
JJJJG
et une force F
J
G
donnés, le moment est maximum lorsque OM
JJJJG
est
perpendiculaire à F
JG
, et nul s'ils sont colinéaires.
Attention, le moment dépend de l'origine O choisie.
Le moment f
m
JJJG
est perpendiculaire à OM
J
JJJG
et à F
J
G
, et pour le sens, à vos tire-bouchons, ou
boulons à pas normal (à droite).
Exemple de moment : moment de serrage d'un boulon, égal au produit de la force par le bras
de levier; les clés dynamométriques sont graduées en m.N (ou m.daN). En fait, dans le
langage commun, on parle souvent de couple, ce qui est inexact, voir en fin de chapitre le
moment d'un couple.
2. Moment cinétique
Le moment cinétique d’une masse de quantité de mouvement
p
J
G
, située au point M, par
rapport à un point O, est défini par :
LOM p=∧
JG JJJJGJG
moment cinétique (2)
Son unité est le kg.m2.s-1. Bien que compliquée, elle ne porte pas de nom spécifique.
Son orientation est liée au sens de rotation autour du point O (cf. tire-bouchon).

Moments
72
72
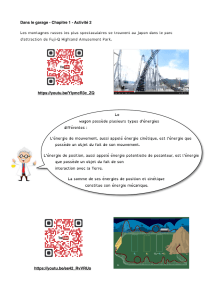
Théorème du moment cinétique
L(t)
L(t+dt)
m
f
.dt
Moment d’une force
m
f
= OM F
m
f
= d . Fm
f
= d . F
Si OM et F sont dans le plan de la feuille,
le moment est perpendiculaire à la feuille,
ic i dirigé vers le lecteur
Définition vectorielle Module
m
f
= l. F . sin(θ)m
f
= l. F . sin(θ)
Il existe en fait
2 possibilités
de projection:
M
OF
Fd
θ
l
M
O
F
d
θ
l
M
O
F
F
d: bras de levier
[]
.().lsin F
θ
[]
..()lFsin
θ

Moments
73
73
Comme le moment d'une force, le moment cinétique dépend de l'origine O, que l'on choisira
en fonction du système à étudier.
Il est nul si OM
JJJJG
et
p
JG
sont colinéaires.
Dans un mouvement de rotation suivant un cercle de centre O, le moment cinétique/O est égal
au produit : rayon * masse * vitesse. Il est perpendiculaire au plan du cercle et le tire
bouchon vous donnera son sens.
3. Théorème du moment cinétique
Il établit un lien entre la variation du moment cinétique et le moment de la force (tous deux
exprimés par rapport au même point O). Ce théorème est l'équivalent du principe fondamental
de la dynamique qui établit un lien entre la variation de la quantité de mouvement et la force
appliquée. (2) =>
dL dOM p OM dp=∧+∧
JG JJJJG JG JJJJGJG
Or dOM Vdt=
JJJJGJG
et, comme
p
mV=
JG JG
, le premier produit vectoriel est nul.
Dans le deuxième produit, dp Fdt=
JG J G
(principe fondamental) et nous retrouvons donc la
définition du moment d'une force (1).
D'où le théorème du moment cinétique, valable même si la masse n'est pas constante:
f
dL dtm
=
JG JJJG
théorème du moment cinétique (3)
La conclusion est donc que l'application pendant dt d'une force F
J
G
, qui présente un moment
f
m
JJJG
par rapport à un point O, produit une variation f
dL dtm=
J
G JJJG
du système.
Attention:
• le principe fondamental a été utilisé et il est donc nécessaire de se placer dans un
référentiel Galiléen.
• pour que V
JG
soit la vitesse du point M ( dOM Vdt=
J
JJJGJG
), il faut évidemment que le
point O soit FIXE dans le référentiel choisi. Mais ce point n’est pas forcément
l’origine du repère.
Sous sa forme dérivée, ce théorème devient:
f
dL
dt m=
JG JJJG
théorème du moment cinétique (4)
Il est extrêmement pratique pour étudier les problèmes de rotation autour d'un point.
L'application la plus spectaculaire est sans doute l'effet gyroscopique (démonstration avec une
roue de vélo en amphi). Nous en donnons plus loin un autre très belle illustration avec le
mouvement à force centrale.
Remarquez ici la différence entre un principe (hypothèse de travail vérifiée par l'expérience,
comme le principe fondamental de la dynamique) et un théorème, comme le théorème du
moment cinétique que nous avons démontré, à partir du PFD et de propriétés d’opérateurs
mathématiques.
 6
7
8
9
6
7
8
9
1
/
9
100%