moment d`une force - moment cinetique

http://sbeccompany.fr
MOMENT D’UNE FORCE – MOMENT CINETIQUE
I – Moment d’une force
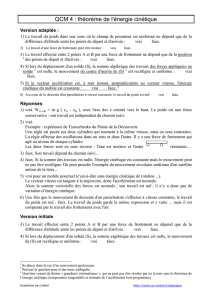
Le moment d’une force
F
, appliquée en un point M, par rapport à un point O, est défini
par :
(
)
O
F OM F
m
= ∧
M : moment de F par rapport à O en N.m (≡J) (le moment scalaire peut être perçu comme
l’énergie pour mettre en rotation un objet autour d’un axe défini par la direction du vecteur
moment et dans un sens lié au sens du vecteur moment).
( ) ( ) ( )
: &
:
: sin ,
O
O
support OM F
F sens défini parlesensderotation
intensité F OM F OM F
mm
∆ ⊥ ∆ ⊥
=
= ⋅ ⋅
Le sens du vecteur moment est définit à l’aide du produit vectoriel. En clair, M, OM et F
doivent former un trièdre direct (règle du tire-bouchon ou des trois doigts). Si la force F fait
tourner le vecteur OM dans le sens trigonométrique direct, alors M « rentre » dans la feuille et
inversement (même comportement qu’une vis qu’on tourne dans un sens ou dans l’autre).
Le moment scalaire est maximum pour un angle entre les deux vecteurs de 90° et est nul
lorsqu’ils sont colinéaires. Il peut être aussi calculer rapidement par le produit de la distance
orthogonale d(O,F) (bras de levier) et de l’intensité de la force :
(
)
.
O
F F d
m
=
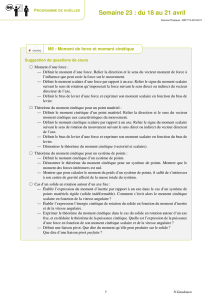
II – Moment cinétique
Le moment cinétique d’une masse m de quantité de mouvement
p
, située au point M, par
rapport à un point O, est défini par :
O
L OM p
= ∧
L : moment cinétique de m par rapport à O en kg.m
2
.s
-1
(
)
O
F
m
O
M
F
d

Les règles du produit vectoriel sont donc toujours appliquées (pour le sens, la direction et
l’intensité).
(
)
sin ,
O
L OM mV OM p
= ⋅ ⋅
Tout comme le moment d’une force, le moment cinétique dépend donc du point O choisi. Le
moment cinétique est nul si les vecteurs OM et p sont colinéaires.
Dans le cas particulier d’un mouvement de rotation autour de O, on a
O
L rmV
=
.
III – Théorème du moment cinétique
Le théorème du moment cinétique établit un lien entre la variation du moment cinétique et le
moment de la force en un même point. Ce théorème est l’équivalent du principe fondamental
de la dynamique qui établit un lien entre la variation de quantité de mouvement et la force
appliquée.
F dt dP OM F dt OM dP
⋅ = ⇔ ∧ ⋅ = ∧
or
(
)
0
d OM P dOM P OM dP
V dt m V OM dP
OM dP
=
∧ = ∧ + ∧
= ⋅ ∧ ⋅ + ∧
= ∧
donc
(
)
(
)
(
)
O O
OM F dt d OM p F dt dL
m
∧ = ∧ ⇔ ⋅ =
( )
O
O
dL
F
dt
m
=
Remarques :
- on a utilisé le PFD, il faut donc être dans un référentiel Galiléen.
- ce théorème est donc valable même avec une masse variable.
- pour le vecteur vitesse du point (dérivée du vecteur OM) existe, il que O soit fixé.
O
L
O
M
p
( )
O
t dt
L
+
(
)
O
F dt
m
⋅
( )
O
t
L

IV – Application : système matériel isolé
1) Système fermé de 2 points matériels
Soit un système isolé constitué de deux points matériels exerçant l’un sur l’autre une force.
D’après le principe d’action et de réaction on a :
1 2 2 1
F F
= −
(
)
(
)
(
)
(
)
1 2 1 1 2 1 2 2
O O
OM F dt d L OM F dt d L∧ = ∧ =
(
)
(
)
1 2 1 2 1 2 1 2
O O
OM F OM F dt d L L∧ + ∧ = +
(
)
(
)
(
)
1 2 2 1 1 2 1 2 1 2 2 1
0
O O
OM OM F dt d L L car OM F OM F
− ∧ = + = ∧ = ∧
Le résultat ci-dessus est valable pour un système isolé de n points matériels. Il en résulte la loi
de conservation du moment cinétique d’un système isolé.
2) Système fermé de n points matériels
( )
( )
( )
,
next
i j i i k i i O
j j i k
OM F OM F dt d L
≠
∧ + ∧ =
∑ ∑
( )
( )
( )
/
,
/
0
total O
n n n n
ext
i j i i k i i O
i j j i i k i
somme des moments ext O L
OM F OM F dt d L
≠
=
∧ + ∧ =
∑ ∑ ∑∑ ∑
(
)
( )
n n
ext
i k i i O tot
i k i
OM F dt d L d L
∧ = =
∑∑ ∑
(
)
/ /
ext
F O tot O
d L
m
=
∑
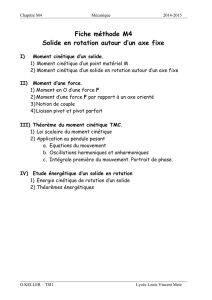
V – Application : mouvement à force centrale
Mouvement d’un point matériel autour d’un point O fixe soumis à une force F toujours
dirigée vers ce point fixe (exemple : un satellite assimilé à un point autour du centre de la
Terre).
(
)
(
)
0
O O
F OM F d L
m
= ∧ = =
O
L OM mV cste
= ∧ =

Cela implique que le mouvement du point M est contenu dans un plan orthogonal au vecteur
moment cinétique.
2
2 2
2
1
2 2
O
d
L m cste
dt
d
C d C dt
dt C
d dS dS dt
θ
ρ
θ
ρ ρ θ
ρ θ
= =
=⇒⋅ = ⋅
⋅ = ⇒=
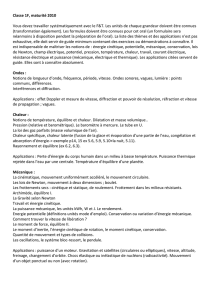
dS est la surface balayée par le vecteur OM pendant un instant dt.
2
C
S t C
′
= +
On peut donc en conclure que pour des durées égales, les surfaces balayées par le rayon
vecteur sont égale. Cette loi est connue sous le nom de loi des aires ou encore deuxième loi de
Kepler (relative aux ellipses formées par les trajectoires des satellites et des planètes).
Mouvement à force centrale:
coordonnées polaires
O
x
y
z
M
dρ
ρdθ
θ
dθ
ρ
ku
θ
u
ρ
L
0
Mouvement à force centrale:
coordonnées polaires
O
x
y
z
M
dρ
ρdθ
θ
dθ
ρ
kk u
θ
u
θ
u
ρ
L
0
O
t
t+∆t
t+2∆t
S
1
S
2
θ
1
θ
2
S
1
= S
2
En général,
θ
1
est différent de θ
2
O
t
t+∆t
t+2∆t
S
1
S
2
θ
1
θ
2
S
1
= S
2
En général,
θ
1
est différent de θ
2

VI – Moment d’un couple
Un couple est constitué de 2 forces égales et opposées (même module, même direction, de
sens opposé, mais pas colinéaires). Son moment est la somme de chacun des moments:
(
)
1 2
( )
O
F OM F OM F
m
= ∧ − + ∧
soit :
(
)
1 2O
F M O F OM F
m
= ∧ + ∧
qui s'écrit finalement :
(
)
1 2O
F M M F
m
= ∧
Contrairement au moment d'une force, celui d'un couple est donc indépendant de l’origine
choisie. Il est nul si les forces sont colinéaires, ce qui se conçoit aisément.
VII – Moment par rapport à un axe
En mécanique de rotation des solides, ou tout simplement lorsqu’on serre une vis, c’est le
moment par rapport à l’axe (de la vis par exemple) qui est la valeur "efficace".
Si le point O est sur cet axe, et si
n
est un vecteur unitaire de cet axe, le moment "efficace"
par rapport à l’axe est donné par le scalaire :
(
)
O
F n
m
Μ = ⋅
Si le produit scalaire est > 0, le moment engendre une rotation dans le sens du tire-bouchon.
Pour résoudre de petits problèmes, tels que celui du treuil et de sa manivelle, ou de la balance
romaine, précisons que, pour qu’un système en rotation autour d’un axe ne soit pas accéléré
(entre autres cas, immobile), il faut que la somme des moments, par rapport à cet axe, des
forces extérieures appliquées soit nulle.
 6
6
1
/
6
100%