DUALHB rid ge 2A

DUAL H Bridge 2A
RS-E02 V1
Guide d'utilisation : Français
PREMIÈRE ÉDITION - Rev.1
ROBOTSHOP
Email: [email protected]
www.robotshop.ca

Page 2 Page 3
Introduction
Félicitations! Vous avez acheté le mini H-Bridge RS-E02.
Ce manuel contient une description brève de la carte, les spécifications
techniques, les instructions d'utilisation, ainsi qu'une section de
dépistage de pannes.
Description
Le circuit intégré L298N, constituant le noyau de la carte, contient deux
ponts complets, compatibles avec les niveaux logiques standards de
TTL et capables d'alimenter des charges inductives telles que les
relais, solénoïdes, moteurs à courant continu et moteurs pas à pas.
L'intervalle de la tension d'alimentation est de 5V à 46V, toutefois, il est
conseillé de ne pas dépasser une tension de 24V, sinon un radiateur en
aluminium et un ventilateur de refroidissement seront exigés.
Le courant total débité par le pont est de 4A (2A par canal). les pics de
courant ne dépassant pas 2.5A sont tolérés, toutefois, l'ajout de
fusibles à la sortie des moteurs est conseillé.
Trois entrées logiques de contrôle A,B et E sont fournies pour chaque
canal.
Spécifications techniques
- Dimensions externes: 2.3'' x 1.54''
- Tension d'alimentation recommandée: 5V to 24V
- Courant continu à la sortie: 2A par canal
- Tension d'alimentation logique: 5V
(Possibilité d'ajout d'un régulateur 5V qui fournit la tension
d'alimentation logique. Les détails sont donnés ultérieurement)
- Tension d'entrée niveau bas V
IL
: 1.5V
- Tension d'entrée niveau haut V
IH
: 2.3V
- Protection pour dépassement de température
- Arrêt dû à l'échauffement
- Retour de courant
Instructions d'utilisation
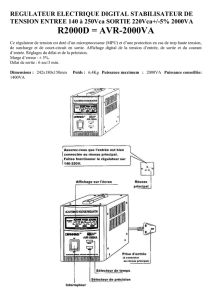
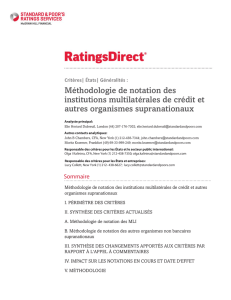
Les connexions des moteurs et de la carte sont données à la figure 1.
Connecter M1+ à la borne positive du moteur 1 et M1- à sa borne
négative. Pareil pour le moteur 2.
Les entrées logiques de contrôle A, B et E sont mises à '1' par défaut,
en utilisant des résistances de 10K , de sorte à ce que les moteurs
restent au repos lorsque aucun signal n'y est appliqué.
Les entrées de contrôle A et B déterminent le sens de rotation: pour
une rotation dans le sens horaire (respectivement trigonométrique) il
faut connecter B (resp. A) à la masse.
DUAL H-BRIDGE 2A RS-E02 v1
R1
R2
R3
R4
R5
R6
R7
R8
D1
D2
D3
D4
D5
D6
D7
D8
R9 L1
CN2
J2
GND+5V I1 I2 E1 E2A1 A2B1 B2
+Vcc
M2-
M2+
M1+
M1-
GND
www.robotshop.ca
C3
C2 U2
+
C1
J1
M1
+
-
M2
+
-
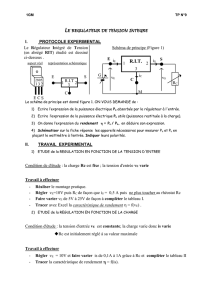
E1 B1 A1 MOTEUR 1 M1
B X X Eteint
H B B Arrêt
H H B Rotation SH MAX
H B H Rotation ST MAX
H H H Stop
MLI
H B Vitesse var. SH
MLI
B H Vitesse var. ST
H= Haut B= Bas X= indéfini
Configuration par défaut
La carte permet un retour de courant aux bornes I1 et I2. Pour cela il faut
ajouter deux résistances, de 0.5 Ohm chaque, à R7 et R8. Si l'utilisateur ne
désire pas effectuer un contrôle de courant, les bornes I1 et I2 doivent être
connectées à la masse.
Fig. 1
Pour arrêter le moteur il faut connecter E à la masse et pour un fonctionnement
à vitesse variable il faut y appliquer un signal MLI. Les détails sont donnés à la
section de contrôle de vitesse.
La table de vérité de A, B et E est donnée ci dessous.

Page 5
Contrôle de vitesse
La modulation par largeur d'impulsions (MLI) est une technique assez
répandue pour le contrôle de la vitesse d'un moteur. Elle consiste à
hacher le signal à l'entrée du pont et fournit, à sa sortie, une tension
dont la valeur moyenne est proportionnelle au rapport cyclique du
signal de commande.
Ex: Etant donné un moteur 12V, en y appliquant une tension pendant la
moitié de l'intervalle de temps, et l'annulant pendant la deuxième
moitié, (le découpage se fait à qqes KHz), la tension effective appliquée
au moteur sera de 6V.
La carte mini H-Bridge RS-E02 permet un contrôle de la vitesse du
moteur en appliquant un signal MLI au signal de contrôle E.
1- Le moteur ne tourne pas
Vérifier les connexions au niveau des alimentations et de la masse.
Connecter toutes les masses ensemble.
2- Le moteur s'arrête et tourne
La limite de courant est atteinte et, par conséquent, l'arrêt interne est
activé.
Le courant doit être diminué jusqu'à 2A.
3- Bruit électrique
Séparer les connexions du moteur du circuit logique.
Ajouter une capacité de 10uF aux bornes du moteur entre M+ et M-.
Dépistage de pannes
La carte RS-E02 n'est pas garantie comme étant un dispositif fiable. Ainsi, elle
ne doit pas être utilisée dans un appareillage médical ou tout autre dispositif
où une erreur d'opération peut conduire à une blessure ou à la mort.
A V E R T I S S E M E N T
Photo 1
Page 4
DUAL H-BRIDGE 2A RS-E02 v1
R1
R2
R3
R4
R5
R6
R7
R8
D1
D2
D3
D4
D5
D6
D7
D8
R9 L1
CN2
J2
GND+5V I1 I2 E1 E2A1 A2B1 B2
+Vcc
M2-
M2+
M1+
M1-
GND
www.robotshop.ca
C3
C2 U2
+
C1
J1
M1
+
-
M2
+
-
E M S
LM 7805
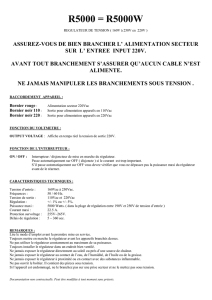
Si la tension d'alimentation ne fournit pas 5V, tension nécessaire pour
l'alimentation de la partie logique, l'utilisateur peut ajouter un régulateur 5V
U2 7805 à la carte (le régulateur n'est pas fourni). En y appliquant la
tension d'alimetation, le régulateur fournit à sa sortie une tension constante
de 5V. A noter que la tension d'alimentation doit être supérieure à 6V.
1- Ajouter un régulateur 7805 à U2 comme illustré à la Fig. 2 et à la photo 1
2- Ajouter deux jonctions à J1 et J2
Pour activer (resp. désactiver) le régulateur, J1 doit être connectée (resp.
déconnectée)
La jonction J2 détermine la direction du signal à la borne 3 du connecteur
CN2: si J2 est connectée, la borne 3 est une sortie qui fournit 5V, sinon, la
borne 3 est une entrée qui doit être alimentée de 5V par une source
d'alimentation externe.
Ajout du régulateur de tension 5V
Fig. 2
1
/
3
100%